

Программное управление (автономные су).
Обеспечивают управление вектором тяги летательного аппарата по заранее известной программе. При этом информация о цели не поступает. Информационными сигналами являются сигналы об угловом положении летательного аппарата на траектории.
Область применения:
Системы управления баллистическими ракетами.
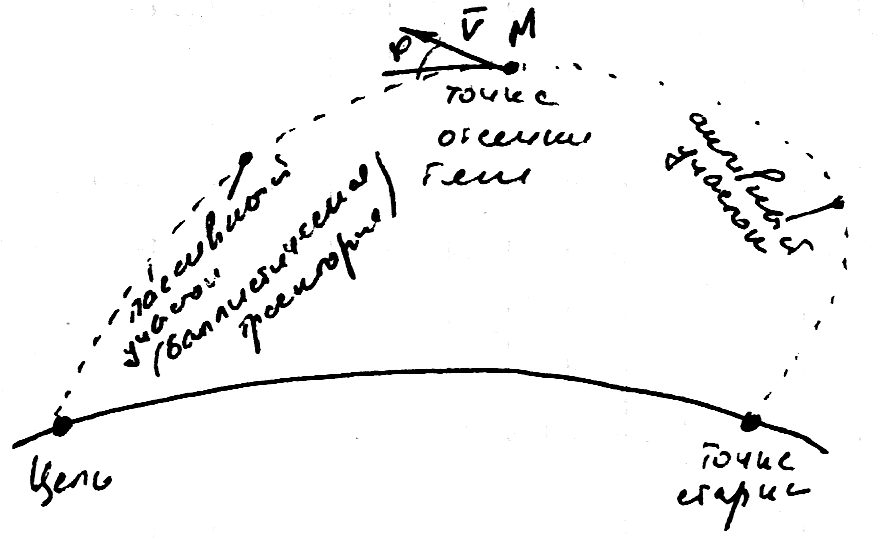
Процесс управления заключается в следующем:
перед стартом в систему управления вводится полётное задание
на активном участке траектории с использованием бортовых источников информации (бортовые гироскопы и бортовые акселераторы) измеряется фактическое состояние параметров траектории.
На основе выработанных сигналов шибки формируется управляющее воздействие корректирующее фактические V и
Преимущества автономных систем:
высокая помехоустойчивость
высокая точность
Недостатки:
невозможность стрельбы по перемещающимся целям
Командное теленаведение.
Система управления, подразумевающая наличие командного пункта, расположенного вне снаряда, в котором формируются команды управления.

На КП существуют два измерительных устройства, работающие в единой земной системе координат, связанной с КП. Первая система измеряет угловые положения цели – визир. Технически, первая система представляет собой, как правило, оптическую систему. Вторая система, как правило, инфракрасная (теплопеленгатор), измеряющая угловые координаты снаряда. Команды управления снарядом пропорциональны его линейному отклонению в двух плоскостях: в вертикальной и горизонтальной.
В качестве методов наведения может быть использован метод погони, пропорционального сближения, параллельного сближения.
Возможны варианты при реализации командных систем управления: в частности командное наведение по радиотропе.
Область применения:
Ракетные комплексы поля боя (ПТУРС, ЗУР, ракеты воздушного боя)
Преимущества:
Большая дальность действия.
Высокая помехозащищённость
Недостатки:
Невысокая точность наведения с ошибками, увеличивающимися по мере приближения снаряда к цели
Высокие динамические погрешности наведения
Системы самонаведения.
Измерение координат цели, ракеты и формирование сигналов управления осуществляется на борту ракеты. Для измерения координат цели могут быть использованы системы с различными видами носителей информации:
электромагнитное излучение радиодиапазона (радиолокатор).
Преимущества: всепогодность, высокая точность
Недостатки: низкая помехоустойчивость и скрытность
электромагнитное излучение оптического диапазона
телевидение, лазер
инфракрасное излучение
Преимущества систем самонаведения:
высокая точность, увеличивающаяся по мере приближения снаряда к цели
малые динамические погрешности
высокая скрытность действия
Недостатки:
низкая помехозащищённость
ограниченная дальность действия
Область применения:
Зенитные управляемые ракеты.
Ракеты воздушного боя.
Ракеты воздух-поверхность
Устройства измерения координат.
Устройства измерения координат управляемого оружия делятся на:
Бортовые измерители координат ракеты
Измерители координат цели
Бортовые измерители координат ракеты.
Управление снарядом осуществляется путём измерения координат центра масс и путём измерения угловых координат снаряда при его движении вокруг центра масс. На основе полученной информации формируются управляющие воздействия на снаряд. Для осуществления указанных измерений на борту снаряда используются:
Гироскопические измерители углов и угловых скоростей
Акселерометры
Барометрические измерители высоты
Магнитные измерители курса
Измерители, как правило, комплектуются датчиками, которые превращают измеренную информацию в удобный для обработки электрический сигнал. Датчики могут быть:
Потенциометрические (точные и сверхточные)
Индуктивные и индукционные датчики
Ёмкостные (неточные)