

5 Построение логарифмической амплитудо-частотной характеристики и логарифмической фазо-частотной характеристики системы
Передаточная функция системы после z-преобразования
 .
(51)
.
(51)
Для перехода к псевдочастоте осуществим биполярные преобразования, используя программу Mathcad. Для этого произведем подстановку
 ,
(52)
,
(52)

 .
(53)
.
(53)
Перейдем от ω-изображению к передаточной функции от псевдочастоты, сделав подстановку
![]() ,
(54)
,
(54)
![]()

 .
(55)
.
(55)
Таким образом, мы получили функцию ω-изображения

 (56)
(56)
ЛАЧХ и ЛФЧХ, построенные в программе Mathlab, представлено на ри-сунке 6.
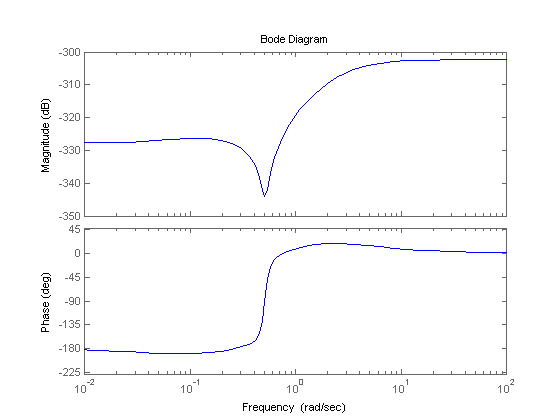


Рисунок 6 — ЛАЧХ и ЛФЧХ системы
Вывод. В данном разделе курсовой работы был произведен переход передаточной функции к псевдочастоте и построение ЛАЧХ и ЛФЧХ системы. Из полученных графиков следует, что система имеет отрицательный коэффициент усиления и не имеет запаса устойчивости по фазе, следовательно необходимо провести коррекцию системы.
6 Постороение желаемой логарифмической амплитудо-частотной характеристики системы, логарифмической амплитудо-частотной характеристики корректирующего устройства
Желаемой называют
асимптотическую ЛАЧХ разомкнутой
системы, имеющей желаемые (требуемые)
статические и динамические свойства.
Строится желаемая ЛАЧХ на основании
требований к системе. Низкочастотная
асимптота ЛАЧХ разомкнутой системы
определяет статические свойства. Если
передаточная функция разомкнутой
системы имеет передаточный коэффициент
![]() и порядок астатизма
и порядок астатизма
![]() ,
удовлетворяющий требованиям, то
низкочастотная асимптота желаемой ЛАЧХ
является низкочастотной асимптотой
неизменной части системы.
,
удовлетворяющий требованиям, то
низкочастотная асимптота желаемой ЛАЧХ
является низкочастотной асимптотой
неизменной части системы.
Среднечастотная
асимптота ЛАЧХ разомкнутой системы и
её сопряжение с низкочастотной определяют
динамические свойства системы –
устойчивость и показатели качества
переходной характеристики. Построение
среднечастотной асимптоты желаемой
ЛАЧХ начинают с выбора частоты среза
![]() .
Для этого используют номограммы В.В.
Солодовникова. Она определяет зависимость
перерегулирования
.
Для этого используют номограммы В.В.
Солодовникова. Она определяет зависимость
перерегулирования
![]() и времени регулирования
и времени регулирования
![]() от максимума
от максимума
![]() вещественной частотной характеристики
замкнутой системы, причем время
регулирования
вещественной частотной характеристики
замкнутой системы, причем время
регулирования
![]() дано в виде в виде функции частоты среза
дано в виде в виде функции частоты среза
![]() .
По заданному значению перерегулирования
.
По заданному значению перерегулирования
![]() определяют значение
определяют значение
![]() .
Затем по
.
Затем по
![]() определяют соотношения между
определяют соотношения между
![]() и
и
![]() .
.
Высокочастотная
асимптота желаемой ЛАЧХ мало влияет на
свойства системы. Поэтому ее выбирают
так, чтобы корректирующее устройство
было возможно более простое. Это
достигается при совмещении высокочастотных
асимптот характеристик
![]() и
и
![]() .
Если совмещение не удается, то
высокочастотная асимптота
.
Если совмещение не удается, то
высокочастотная асимптота
![]() должна иметь тот же наклон, что и
высокочастотная асимптота
должна иметь тот же наклон, что и
высокочастотная асимптота
![]() .
.
Так как система является дискретной, то необходимо определить запретную зону, для этого найдем рабочую точку
А
 ,
(57)
,
(57)
где
![]() — скорость изменения входного сигнала;
— скорость изменения входного сигнала;
![]() — ускорение
изменения входного сигнала;
— ускорение
изменения входного сигнала;
![]() — точность
прохождения сигнала.
— точность
прохождения сигнала.
Зададим значения
![]() об/сек;
об/сек;
![]() об/сек2;
об/сек2;
![]() – допустимая
ошибка
– допустимая
ошибка
Значение частоты рабочей точки
![]() с-1.
(58)
с-1.
(58)
Значение амплитуды рабочей точки
![]() . дБ
(59)
. дБ
(59)
Таким образом, рабочая точка
![]() .
.
Через полученную
точку
![]() проводим прямую с наклоном -20 дБ/дек.
Эта прямая является верхней границей
запретной зоны.
проводим прямую с наклоном -20 дБ/дек.
Эта прямая является верхней границей
запретной зоны.
По номограмме
Солодовникова и заданному в техническом
задании желаемому перерегулированию
![]() %
и времени регулирования
%
и времени регулирования
![]() c
определяем частоту среза
c
определяем частоту среза
![]() ,
(60)
,
(60)
![]() с-1.
с-1.


Рисунок 7 — Реальная, аппроксимированная, желаемая ЛАЧХ и ЛАЧХ корректирующего устройства
Перейдем к псевдочастоте
![]() ,
(61)
,
(61)
![]() ,
(62)
,
(62)
![]() .
.
Наклон ЖЛАЧХ в среднечастотной области должен быть -20 дБ/дек, через частоту среза в этой области проводим прямую с наклоном -20 дБ/дек. В высоко-частотной области ЖЛАЧХ сопрягается с исходной ЛАЧХ, то есть будет иметь такие же наклоны. Низкочастотная область не имеет большого значения, поэтому достраивается произвольно.
Для улучшения параметров системы в ней необходимо установить последовательно-параллельное корректирующее устройство.
По таблицам из атласа Топчеева, подберем, корректирующее устройство, представленное на рисунке 8, с передаточной функцией:
![]() ,
(63)
,
(63)
![]() ,
(64)
,
(64)
![]() .
(65)
.
(65)

Рисунок 8 — Электрическая схема корректирующего устройства
Зададим значения
![]() Ом,
Ом,
![]() Ом,
Ом,
![]() Ф,
Ф,
![]() ,
,
![]() .
.
Передаточная функция корректирующего устройства
![]() .
(66)
.
(66)
Произведем обратное преобразование Лапласа с помощью программы Mathcad и получим передаточную функцию корректирующего устройства в z-форме
![]() .
(67)
.
(67)
Проведем анализ скорректированной системы.
Передаточная функция ЖЛАЧХ
![]() .
(68)
.
(68)
Построим переходный процесс для скорректированной системы и оценим показатели качества системы. Переходный процесс представлен на рисунке 9.


Рисунок 9 — Переходный процесс скорректированной системы
По графику переходного процесса, представленному определим прямые оценки качества системы:
- установившееся
значение hуст=![]() ;
;
- максимальное
значение hmax=![]() ;
;
- время первого согласования t1=0,4 с;
- время нарастания переходного процесса tн=0,6 с;
- время регулирования tр=1,5;
- перерегулирование
![]() 19%.
19%.
Вывод. Для улучшения параметров системы было рассчитано последо-вательно-параллельное корректирующее устройство. При включении корректирующего устройства в систему, были получены требуемые характеристики.