

5.3. Выбор корректирующего звена
Для выбора корректирующего звена проанализируем переходные процессы в замкнутых системах при различных способах коррекции, представленные на рисунке 24:
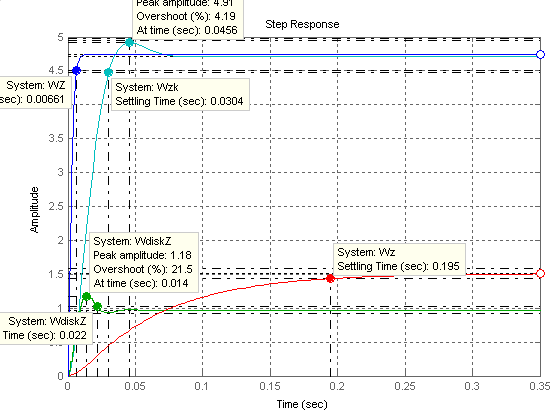
Рисунок 24 – Переходные процессы в замкнутой системе при различных способах коррекции
Из графиков видно, что наилучшие характеристики имеет непрерывная система, скорректированная методом Солодовникова. Последовательное корректирующее устройство в непрерывной системе, скорректированной методом корневого годографа, имеет наиболее простую реализацию, но при этом обеспечивает худшие характеристики. Система с последовательным дискретным корректирующим устройством занимает промежуточное положение. Таким образом, будем использовать цифровое корректирующее устройство.
Заключение
В состав спроектированной САУ деревообрабатывающего станка следует включить последовательное дискретное корректирующее устройство (микроконтроллер), потому что оно обеспечивает хорошие динамические характеристики, и при этом лишено недостатков аналогового корректирующего устройства. Так как двукратное дифференцирование сигнала пассивными четырехполюсниками ведет к повышению уровня помех, а также изменение характеристик R, C элементов в результате действия внешних факторов или старения скажется на динамических свойствах корректирующего устройства. Микроконтроллер за счет свойств цифрового сигнала менее подвержен помехам, и изменение характеристик полупроводниковых элементов меньше скажется на качестве регулирования.
Кроме того, путем программирования микроконтроллера, можно изменять его передаточную функцию, в зависимости от требуемых характеристик. Например, уменьшить время переходного процесса, или увеличить запасы устойчивости.
Список литературы
1. Барташевич А.А. Технология производства мебели. Ростов н/Д: Феникс, 2003.
2. Бессонов Л. А. Теоретические основы электротехники. Электрические цепи: Учебник.- 10-e изд. M.: Гардарики, 2002.
3. Воронов А.А. Теория автоматического управления. М.:.Высш. шк., 1986.
4. Гордин Е.М., Стародуб К.Я. Автоматическое регулирование. М.:.Высш. шк., 1986.
5. Горюнов Н.Н. Справочник по полупроводниковым диодам, транзисторам и интегральным схемам. М.: Энергия, 1972.
6. Дьяконов В. П. MATLAB 6/6.1/6.5+Simulink 4/5 в математике и моделировании. Полное руководство пользователя. М.: СОЛОН-Пресс, 2003.
7.Келим Ю. М. Типовые элементы систем автоматизированного управления. М.:ФОРУМ:ИНФРА-М, 2002.
8. Москаленко В.В. Системы автоматизированного управления электроприводом. М.: ИНФРА-М, 2004.
9. Орлов И.Н. Электротехнический справочник. М.:Энергоатомиздат, 1986.
10. Топчеев Ю.И. Атлас для проектирования систем автоматического регулирования. М: Машиностроение, 1989г.