

3 Деление лсу на изменяемую и неизменяемую части.
ОПРЕДЕЛЕНИЕ УСТОЙЧИВОСТИ
К неизменяемой части относят все элементы регулятора с передаточной функцией отличной от единицы. Следовательно, к ним можно отнести все элементы кроме операционных усилителей. Таким образом в данной САУ предусматривается установка цифрового микроконтроллера, который может осуществлять вычисление сигнала рассогласования, а при необходимости реализовывать программную коррекцию системы.
Определим передаточную функцию системы, передаточная функция главной цепи будет:
![]() .
(20)
.
(20)
Передаточная функция разомкнутой системы будет:
![]() . (21)
. (21)
Передаточная функция замкнутой системы:
![]() . (22)
. (22)
По выражению (21) построим АФЧХ разомкнутой системы, изображенную на рисунке 3:
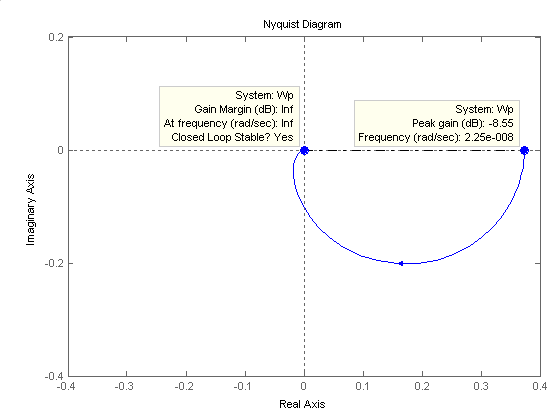
Рисунок 3 – АФЧХ разомкнутой системы
Согласно критерию Найквиста, замкнутая автоматическая система регулирования будет устойчивой, если АФХ разомкнутой системы не охватывает точку с координатами -1,j0 ,таким образом, имеем устойчивую систему с неограниченно большими запасами по амплитуде и фазе [3].
4 ПОСТРОЕНИЕ ЛОГАРИФМИЧЕСКИХ ХАРАКТЕРИСТИК И ИХ
АНАЛИЗ
4.1 Построение ЛАЧX
Разомкнутая система образована двумя, соединенными последовательно, апериодическими звеньями, для которых частоты среза будут:
ω1=1/T1=11.27 рад/c,
ω1=1/T1=126.7 рад/c.
По выражению (21) построим ЛАЧХ и ЛФЧХ – рисунок 4, разомкнутой системы, а по выражению (22) построим переходный процесс в замкнутой системе - рисунок 5:

Рисунок 4 – ЛАЧХ и ЛФЧХ разомкнутой системы
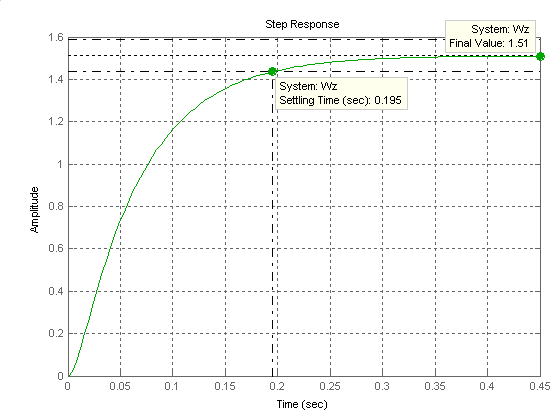
Рисунок 5 – Переходный процесс в замкнутой системе
Прямые оценки качества переходной характеристики:
1. Время регулирования tp=0.195 c;
2. Перерегулирование σ=(1.51-1.51)/1.51=0 %.
Можно сделать вывод, что система является устойчивой с неограниченно большими запасами по амплитуде и фазе, но характеристики переходного процесса системы не удовлетворяют заданным. То есть, необходима коррекция системы.
4.2 Построение ЖЛАЧХ
Проведем построение ЖЛАЧХ методом Солодовникова.
Желаемой называют асимптотическую ЛАЧХ разомкнутой системы, имеющей желаемые (требуемые) статические и динамические свойства. ЖЛАЧХ состоит из трех основных асимптот: низкочастотной, среднечастотной и высокочастотной. Среднечастотная асимптота ЛАЧХ разомкнутой системы и ее сопряжение с низкочастотной определяют динамические свойства системы – устойчивость и показатели качества переходной характеристики.
Построение среднечастотной асимптоты ЖЛАЧХ начинают с выбора частоты среза ωср. Для этого используется номограмма, составленная В.В.Солодовниковым. Она определяет зависимость перерегулирования σ и времени регулирования tp, от максимума Рмах вещественной частотной характеристики [3].
Зададим время регулирование tp=0.04 c и величину перерегулирования σ=30%, тогда, согласно номограмме Солодовникова, Рмах составит 1.27, а частоту среза найдем из формулы:
![]()
![]() . (23)
. (23)
Таким образом, ωср=275 рад/с.
Среднечастотная асимптота ЖЛАЧХ проводится через точку ωср с наклоном -20 дБ/дек. При большем наклоне трудно обеспечить необходимый запас устойчивости и допустимое перерегулирование. Протяженность среднечастотной асимптоты устанавливается исходя из необходимого запаса устойчивости. Для указанного выбора по ранее найденному значению Рмах=1.27 с помощью кривых на соответствующей номограмме определяют предельные значения Lm логарифмических амплитуд, в нашем случае Lm=14 дБ. Определим сопрягающие частоты:
ωсоп1=54.7 рад/с;
ωсоп2=1390 рад/с.
В низкочастотной и высокочастотной части наклоны ЖЛАЧХ и ЛАЧХ должны совпадать, при этом получим новый коэффициент усиления.
Исходную ЛАЧХ и ЖЛАЧХ разомкнутой системы, построенную методом Солодовникова изобразим на рисунке 6.
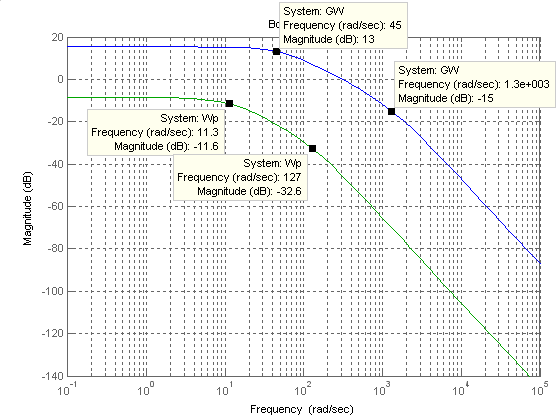
Рисунок 6 – ЖЛАЧХ, построенная методом Солодовникова
Передаточная функция разомкнутой системы, скорректированной методом Солодовникова, будет иметь вид:
![]() .
(24)
.
(24)
Передаточная функция замкнутой системы, скорректированной методом Солодовникова, будет иметь вид:
![]() . (25)
. (25)
Тогда переходный процесс в замкнутой системе скорректированной методом Солодовникова изобразим на рисунке 7:

Рисунок 7 – Переходный процесс в замкнутой системе, скорректированной методом Солодовникова
Прямые оценки качества переходной характеристики:
1. Время регулирования tp=0.00661 c;
2. Перерегулирование σ=(4.74-4.74)/4.74=0 %.
Данные показатели качества удовлетворяют заданным требованиям. Несоответствие показателей качества с их расчетными значениями объясняются значительным отличием вида вещественной частотной характеристики скорректированной системы от типовой, по которой составлены номограммы.
Определим желаемую передаточную функцию последовательного корректирующего устройства:
![]() (26)
(26)
Так как реализация корректирующего устройства должна быть по возможности более простой, то дополнительно проведем синтез корректирующего элемента системы методом корневого годографа.
4.3 Построение ЖЛАЧХ методом корневого годографа
Траектории, описываемые на комплексной плоскости корнями характеристического уравнения замкнутой системы при плавном изменении одного из ее параметров от 0 до ∞, называют корневым годографом. Располагая корневым годографом, можно выбрать необходимое значение варьируемого параметра, соответствующего наиболее выгодному расположению корней с точки зрения требований к качеству конкретной системы [3].
В частности программа MATLAB предоставляет функцию (rltool), открывающую графический интерфейс, позволяющий проектировать корректирующее звено в замкнутой одномерной системе управления методом корневого годографа (МКГ) [6].
Соответственно произведем коррекцию системы путем изменения коэффициента усиления, то есть перемещая ЛАЧХ разомкнутой системы вверх. В данном случае компенсатор является усилителем.
ЖЛАЧХ разомкнутой системы, полученная методом корневого годографа при коэффициенте усиления компенсатора равным 15, а также положение полюсов системы показаны на рисунке 8.
Передаточная функция разомкнутой системы, скорректированной методом корневого годографа будет иметь вид:
![]() . (27)
. (27)
Передаточная функция замкнутой системы, скорректированной методом корневого годографа:
![]() (28)
(28)
Тогда переходный процесс в замкнутой системе скорректированной методом корневого годографа изобразим на рисунке 9:

Рисунок 8 - ЖЛАЧХ, построенная методом корневого годографа.
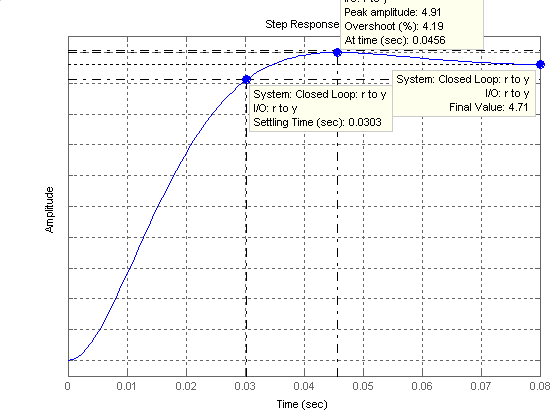
Рисунок 9 – Переходный процесс в замкнутой системе, скорректированной методом корневого годографа
Прямые оценки качества переходной характеристики:
1. Время регулирования tp=0.03 c,
2. Перерегулирование σ=(4.91-4.71)/4.71= 4.19 %.
Данные показатели качества удовлетворяют заданным требованиям.
Найдем запасы по амплитуде и фазе для скорректированных систем с помощью АФЧХ разомкнутых систем – рисунок 10:
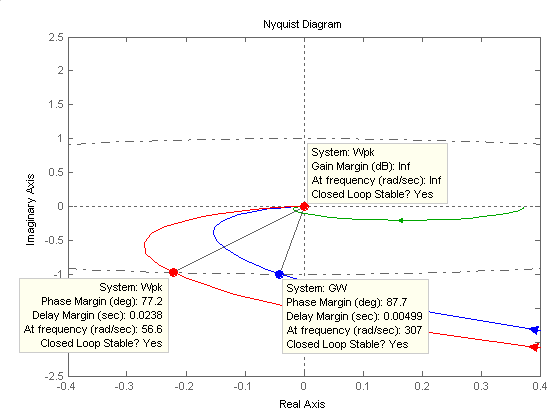
Рисунок 10 – АФЧХ исходной разомкнутой системы, а также скорректированных методом Солодовникова и методом корневого годографа
Из рисунка 10 можно определить, что все системы имеют неограниченно большой запас по амплитуде. Запас по фазе для системы скорректированной методом Солодовникова составляет 87.7 градусов, для системы скорректированной методом корневого годографа – 77.2 градусов, что отвечает требования технического задания.
Кроме того, построим ЛАЧХ и ЛФЧХ исходной и скорректированных разомкнутых систем - рисунок 11 и переходные процессы в исходной и скорректированных замкнутых системах - рисунок 12.
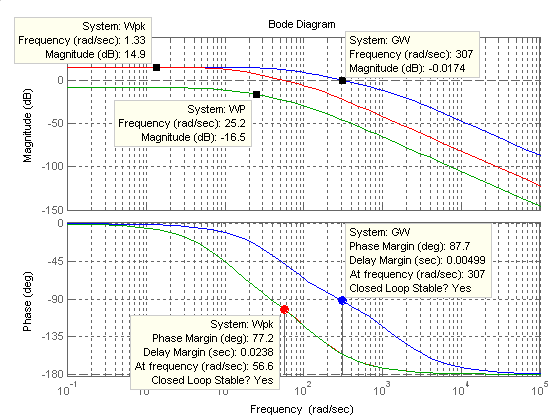
Рисунок 11 – ЛАЧХ и ЛФЧХ исходной разомкнутой системы, а также скорректированных методом Солодовникова и методом корневого годографа
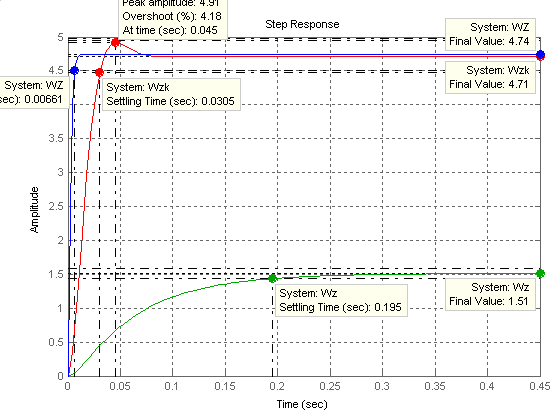
Рисунок 12 – Переходный процесс в исходной замкнутой системе, а также скорректированных методом Солодовникова и методом корневого годографа
5 СИНТЕЗ КОРРЕКТИРУЮЩЕГО ЗВЕНА
5.1 Синтез непрерывных корректирующих звеньев
Для синтеза корректирующих устройств построим ЖЛАЧХ корректирующих звеньев - рисунок 13, WkS для корректирующего звена, полученного методом Солодовникова и WkU для корректирующего звена, полученного методом корневого годографа:
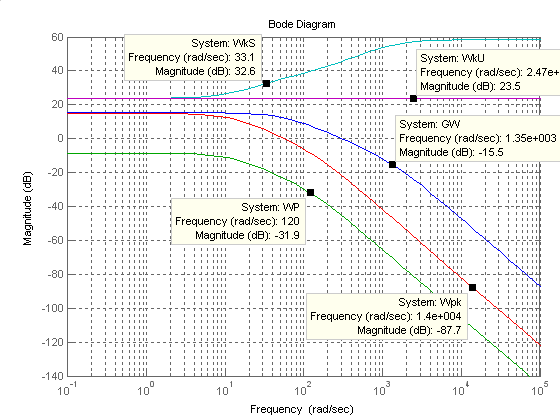
Рисунок 13 – ЖЛАЧХ корректирующих звеньев
В случае последовательного корректирующего устройство полученного методом корневого годографа оно может быть реализовано в виде усилителя с коэффициентом усиления 15.
В случае последовательного корректирующего устройства, полученного методом Солодовникова желаемую передаточную функцию корректирующего звена (26) можно реализовать двумя дифференцирующими четырехполюсниками с разделительным усилителем [3]. Изобразим его схему на рисунке 14.
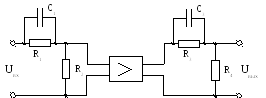
Рисунок 14 – Схема последовательного корректирующего устройства
Передаточная функция первого дифференцирующего четырехполюсника:
 , (29)
, (29)
где KK1=R2/(R1+R2)=0.0911; (30)
T1=R1*C1= 0.0079; (31)
T2=KK1*T1=0.00072. (32)
Передаточная функция второго дифференцирующего четырехполюсника:
 , (33)
, (33)
где KK2=R4/(R3+R4)=0.2; (34)
T3=R3*C2= 0.089; (35)
T4=KK2*T3= 0.018. (36)
При этом усилитель должен иметь коэффициент усиления:
Ку=15.6/(0.0911*0.2)=856.2. (37)