

7 Расчет корректирующего устройства
Для коррекции в системе применяется корректирующее устройство (КУ) последовательного типа. КУ можно включать между различными элементами исходной системы. При выборе места включения руководствуются значением вносимой устройством погрешности. Наиболее предпочтительным вариантом является установка корректирующего устройства после маховика.
По графику корректирующего устройства подберем его передаточную функцию. Как видно из графика, кривая ЛАЧХ корректирующего устройства начинается с наклона 0 дБ/дек, затем переходит в наклон -20 дБ/дек, а потом в наклон -40 дБ/дек. Такого стандартного корректирующего устройства нет, поэтому разобьем его на два корректирующих устройства, соединенных последовательно.
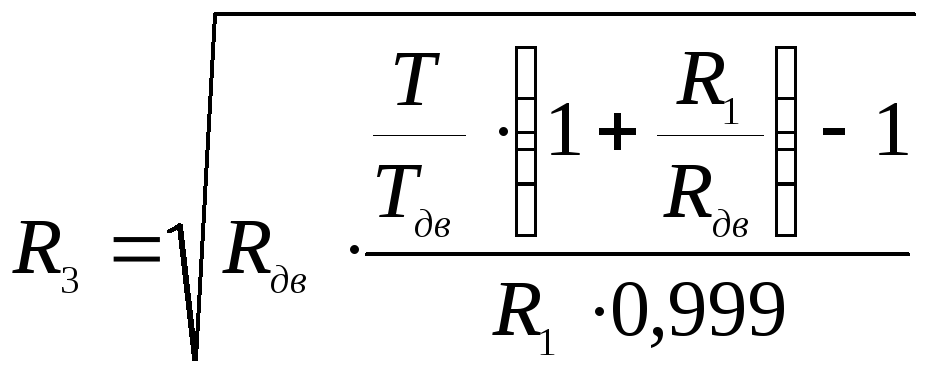
Тогда передаточная функция корректирующего устройства будет иметь вид:
![]() , (38)
, (38)
где
![]() - общая передаточная функция корректирующих
устройств;
- общая передаточная функция корректирующих
устройств;
![]() -
передаточная функция первого
корректирующего устройства, которому
соответствует наклон 0 дБ/дек;
-
передаточная функция первого
корректирующего устройства, которому
соответствует наклон 0 дБ/дек;
![]() -
передаточная функция второго
корректирующего устройства.
-
передаточная функция второго
корректирующего устройства.
Первое корректирующее устройство изображено на рисунке 10.
Рисунок 10 – Усилитель
Передаточная функция данного корректирующего устройства имеет вид:
![]() (39)
(39)
где
![]() - коэффициент усиления, который находим
из графика ЛАЧХ КУ.
- коэффициент усиления, который находим
из графика ЛАЧХ КУ.
![]() (40)
(40)
ЛАЧХ второго корректирующего устройства имеет вид, представленный на рисунке 11.
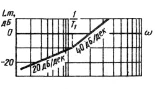
Рисунок 11 – ЛАЧХ корректирующего устройства в общем виде
Передаточная функция второго корректирующего устройства имеет вид:
![]() (41)
(41)
где
![]() (42)
(42)
 (43)
(43)
Второе корректирующее устройство представляет схему, показанную на рисунке 12.
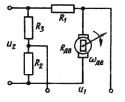
Рисунок 12 – Схема второго корректирующего устройства
Для
определения параметров второго
корректирующего устройства из графика
ЛАЧХ КУ определим частоту излома и
постоянную времени, соответствующую
этой частоте, а также коэффициент
![]() :
:
![]() с-1;
с-1;
![]() с (44)
с (44)
![]() (45)
(45)
![]() (46)
(46)
Зададимся
значением
![]() Ом и выберем двигатель малой мощности
МИ – 11 со следующими техническими
характеристиками:
Ом и выберем двигатель малой мощности
МИ – 11 со следующими техническими
характеристиками:
- сопротивление обмотки якоря, Ом 3;
- электрическая постоянная времени, с 0,1.
Рассчитаем значения параметров элементов, для этого составим систему уравнений.
Из формулы (46) выразим R2, в результате преобразований получим:
![]() (47)
(47)
![]() (48)
(48)
Из
формулы (43) выразим
![]() ,
с учетом (48) получим:
,
с учетом (48) получим:
 (49)
(49)
 Ом (50)
Ом (50)
![]() Ом (51)
Ом (51)
Подставив найденные параметры в выражение для передаточной функции второго корректирующего устройства, получаем передаточную функцию в следующем виде:
![]() (52)
(52)
Таким образом, передаточная функция всего корректирующего устройства примет вид:
![]() (53)
(53)
Итоговая функциональная схема системы примет вид, представленный на рисунке 13.
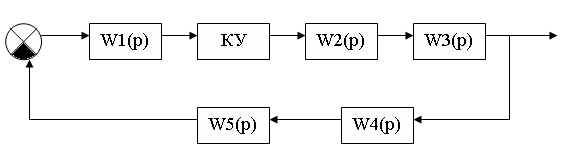
Рисунок 13 – Включение в функциональную схему системы
корректирующего устройства.
Последовательные корректирующие звенья наиболее удобны в электрических САУ, особенно постоянного тока. В этом случае последовательные корректирующие звенья осуществляются в виде пассивных четырехполюсников, передаточные функции которых можно просто и плавно изменять в очень широких пределах, ограниченных лишь достаточно свободными условиями физической реализуемости. К достоинствам последовательной коррекции можно отнести:
- ускорение переходного процесса;
-
снижение установившейся ошибки;
-
простота включения элементов коррекции;
К недостаткам можно отнести:
-
увеличение чувствительности к помехам
-
необходимость согласования сопротивления корректирующих элементов с входным и выходным сопротивлением элементов системы, к которым они подключаются.