

ВВЕДЕНИЕ
Целью курсового проекта является разработка системы автоматического управления велотренажера космического комплекса. Разработка данной автоматической системы управления необходима для управления велотренажером космического комплекса, а также для получения и накопления информации, позволяющей следить за физическим состоянием космонавтов. Проектируемая система должна отвечать всем заданным в техническом задании параметрам.
Велотренажер – это универсальное устройство позволяющее поддерживать свой организм в хорошей физической форме. Он укрепляют сердечно - сосудистую систему, увеличивают выносливость организма, укрепляют дыхательную систему, укрепляют мышечную ткань ног и спины.
На космических станциях наличие велотренажеров просто необходимо, так как космонавты ведут малоподвижный образ жизни из-за гравитации. Им необходимо тренировать опорно-двигательный аппарат, чтобы после длительного нахождения в космосе мышцы не атрофировались. Наличие велотренажера на космическом комплексе позволит значительно уменьшить срок реабилитации космонавтов после их прибытия на Землю.
Внешний вид велотренажера приведен на рисунке 1.

Рисунок 1 – Велотренажер
САУ велотренажера космического комплекса – это электромеханическая система управления, которая предназначена для управления велотренажером, контроля и диагностирования физического состояния космонавтов.
1 РАСШИРЕННОЕ ТЕХНИЧЕСКОЕ ЗАДАНИЕ
САУ велотренажера космического комплекса – это электромеханическая система управления, которая предназначена для управления велотренажером, контроля и диагностирования физического состояния космонавтов.
Входным сигналом системы является число оборотов за единицу времени, выходным сигналом является нагрузка, прикладываемая к педалям.
Состав системы:
1) М - маховик;
2) Т - тормоза;
3) П - падали;
4) ДН – датчик нагрузки;
5) Дв - двигатель;
Функциональная схема системы приведена на рисунке 2.

Рисунок 2 – Функциональная схема системы
Принцип работы системы состоит в следующем: механический сигнал поступает на маховик, под действием которого маховик совершает вращения. С маховика сигнал передается на тормоз, который предназначен для регулировки нагрузки путем создания сопротивления вращения маховика, что приводит к приложению большего усилия к педалям. С тормоза сигнал поступает на педали, к которым прикладывается сила. Датчик нагрузки обратной связи передает сигнал о силе нагрузки. Двигатель выполняет роль преобразователя, преобразуя электрический сигнал в механический.
Технические характеристики системы:
- габариты, см 80×63×120.
- масса в сборе, кг 28;
- диапазон температур, ˚С 18;
- перерегулирование, % 30%;
- время регулирования, мин 5;
- быстродействие, мин 5;
- наработка на отказ, с-1 10-5.
2 ВЫБОР И ОБОСНОВАНИЕ ВЫБОРА ЭЛЕМЕНТНОЙ БАЗЫ
ЛОКАЛЬНОЙ СИСТЕМЫ УПРАВЛЕНИЯ
2.1 Выбор маховика
Маховик играет одну из важных ролей в велотренажере, так как именно от него зависит максимально возможная нагрузка (чем больше вес маховика, тем больше нагрузка), а так же плавность вращения педалей.
Технические характеристики маховика:
- вес, гр 1660;
- размеры, мм 280×24;
- материал алюминий.
Расчет передаточной функции маховика. Передаточная функция маховика имеет вид:
![]() (1)
(1)
![]() (2)
(2)
2.2 Выбор тормоза
В качестве тормозной системы выбраны гидравлические ободные тормоза Magura HS - 33, так как у них есть интегрированная настройка износа колодок, что позволит обеспечить большую надежность системы.
Передаточная функция тормоза:
![]() (3)
(3)
где
![]() (4)
(4)
Передаточная функция тормоза примет вид:
![]() (5)
(5)
2.3 Выбор педалей
Выбор педалей обоснован наличием на них фиксаторов под обувь.
Передаточная функция гидропривода имеет вид:
![]() (6)
(6)
где i – число передачи педалей
![]() (7)
(7)
![]() (8)
(8)
2.4 Выбор датчика нагрузки
В качестве датчика обратной связи выбираем датчик нагрузки, который предназначен для измерения динамических нагрузок. Одним из таких датчиков является FT100, он имеет высокую степень защиты, а также компактен и его можно легко расположить на педали. Внешний вид датчика FT100 представлен на рисунке 3.

Рисунок 3 – Датчик нагрузки FT100
Технические характеристики датчика нагрузки:
- интервал измерений, Н от 0 до 20;
- максимальное отклонение от номинала, % 0,25;
- вид защиты IP53;
- выход, В 2.
Передаточная функция датчика нагрузки имеет вид:
![]() (9)
(9)
![]() (10)
(10)
где k –коэффициент передачи.
![]() (11)
(11)
2.5 Выбор двигателя
В данной системе двигатель выполняет роль преобразователя электрического сигнала в механический. К двигателю предъявляется ряд требований: малая мощность, небольшая номинальная частота вращения. Один из таких двигателей ДГ – 5ТА.
Технические характеристики двигателя:
Номинальная мощность, Вт 5;
Напряжение трогания, В 0,5;
Электромеханическая постоянная времени, с 0,1;
Частота вращения, мин-1 600.
Передаточная функция двигателя имеет вид:
![]() (12)
(12)
![]() (13)
(13)
![]() (14)
(14)
3 РАСЧЕТ ДАТЧИКА ОБРАТНОЙ СВЯЗИ
Принцип действия датчика нагрузки основан на изменении изгиба плоской пружины. В этом случае, пружину необходимо рассчитать по коэффициенту запаса текучести.
Материал пружины – кремнистая сталь;
![]() –максимальная
нагрузка, Н;
–максимальная
нагрузка, Н;
![]() -
максимальный ход пружины, мм;
-
максимальный ход пружины, мм;
![]() -
модуль упругости, Н/мм2;
-
модуль упругости, Н/мм2;
![]() -
придел текучести, Н/мм2;
-
придел текучести, Н/мм2;
![]() -
коэффициент запаса текучести.
-
коэффициент запаса текучести.
1)
Определим допустимое напряжение
![]() .
.
![]() (15)
(15)
![]() Н/мм2.
Н/мм2.
2)
Вычисляем соотношение
![]() .
.
![]() (16)
(16)
где k – коэффициент.
![]() мм.
мм.
3)
Зададимся значением
![]() .
.
где
![]() - длина пружины,
- длина пружины,
![]() - толщина пружины.
- толщина пружины.
![]() ,
так как это отношение считается самым
оптимальным.
,
так как это отношение считается самым
оптимальным.
4) Определим ширину пружины b.
![]() (17)
(17)
![]() мм.
мм.
5) Исходя из расчетов b подбираем соответствующую ему h.
Ширине в 10 мм соответствует толщина 0,08 мм, то есть h=0,08 мм.
6) Вычисляем длину пружины.
 (18)
(18)
![]() мм.
мм.
4 Исследование устойчивости системы
Структурная схема системы имеет следующий вид:
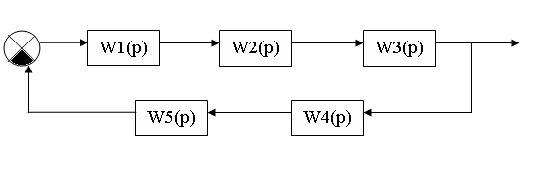
Рисунок 4 – Структурная схема САР велотренажера космического комплекса
Передаточные функции блоков имеют вид:
![]() (19)
(19)
![]() (20)
(20)
![]() (21)
(21)
![]() (22)
(22)
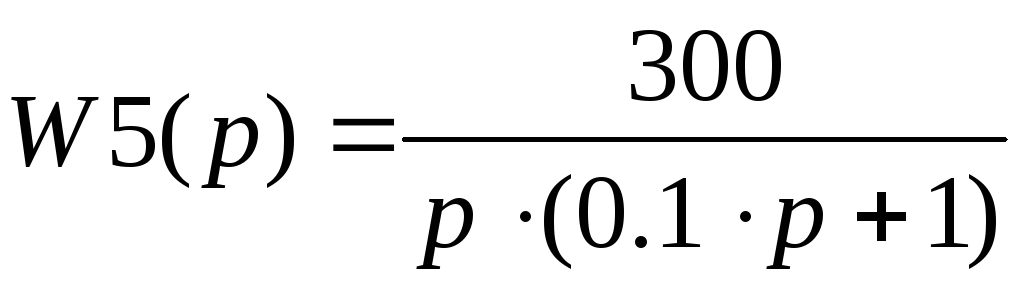 (23)
(23)
Передаточная функция разомкнутой системы:
![]() (24)
(24)
![]() (25)
(25)
Передаточная функция замкнутой системы:
![]() (26)
(26)
![]() (27)
(27)
Корни характеристического уравнения:
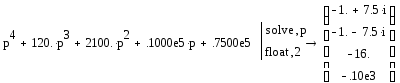 (28)
(28)
По методу Ляпунова если корни характеристического уравнения замкнутой системы вещественные части, то такая система асимптотически устойчива.
Построим переходный процесс замкнутой САУ. Для этого проведем обратное преобразование Лапласа от передаточной функции САУ.
![]() (29)
(29)
 (30)
(30)
График переходного процесса приведен на рисунке 5.
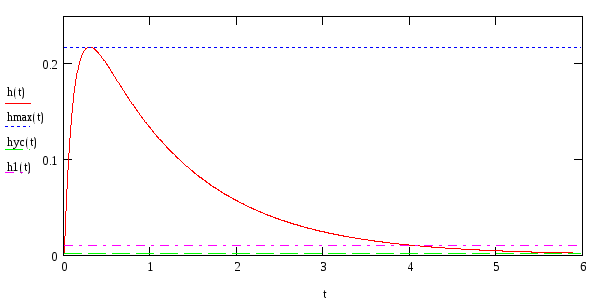

Рисунок 5 – Переходный процесс замкнутой системы
По полученному переходному процессу замкнутой системы определим прямые показатели качества:
Установившееся значение:
![]() =0,002;
=0,002;
Найдем 5% трубку:
![]()
![]()
Тогда 5% интервал отклонения от установившегося значения заключен в пределах от 0,0019 до 0,0021.
Перерегулирование:
![]() (31)
(31)
Время регулирования tр=4 с.
Время нарастания регулируемой величины (время достижения максимума) tн=0,04 c.
Время первого согласования (время, когда регулируемая величина в первый раз достигает своего установившегося значения) t1=0,0001 c.
Колебательность (число колебаний за время колебательного процесса) n=1.
Определим косвенные показатели качества замкнутой системы по графику АЧХ замкнутой системы (рисунок 6).
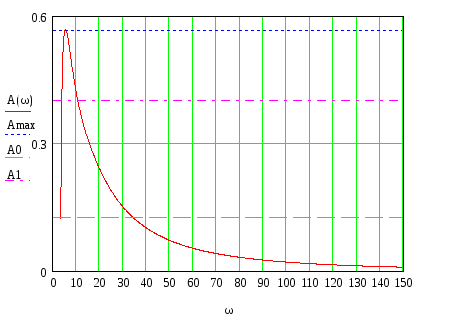
Рисунок 6 – Амплитудно-частотная характеристика замкнутой системы
Резонансная частота (частота при которой АЧХ достигает своего максимального значения) ωр=6.
Показатель колебательности:
![]() (32)
(32)
Полоса
пропускания частот (![]() ),
характеризующая наилучшее время
пропускания сигнала (5; 11).
),
характеризующая наилучшее время
пропускания сигнала (5; 11).
Были определены прямые и косвенные оценки качества САУ велотренажера космического комплекса. По результатам расчетов можно сделать вывод, что замкнутая система устойчива.
5 ПОСТРОЕНИЕ ЛОГАРИФМИЧЕСКИХ ХАРАКТЕРИСТИК САУ
Для дальнейшего исследования, передаточную функцию разомкнутой системы проводим z - преобразование.
Передаточная функция разомкнутой системы имеет вид:
![]() (33)
(33)
Разложим передаточную функцию на элементарные дроби для проведения z-преобразования и разделим на p.
(71)
Для
каждой из дробей найдем соответствующее
z-преобразование.
Тогда в общем виде для данной передаточной
функции, учитывая, что ![]() :
:
![]() (72)
(72)
![]() (73)
(73)
![]() (79)
(79)
Таким образом передаточная функция дискретной системы имеет вид:
![]() (80)
(80)
Заменим z на выражение от псевдочастоты
: z=![]() ,
где
,
где![]() ,
получим:
,
получим:
![]() (81)
(81)
![]() (82)
(82)
Полученная ЛАЧХ приведена на рисунке 13.
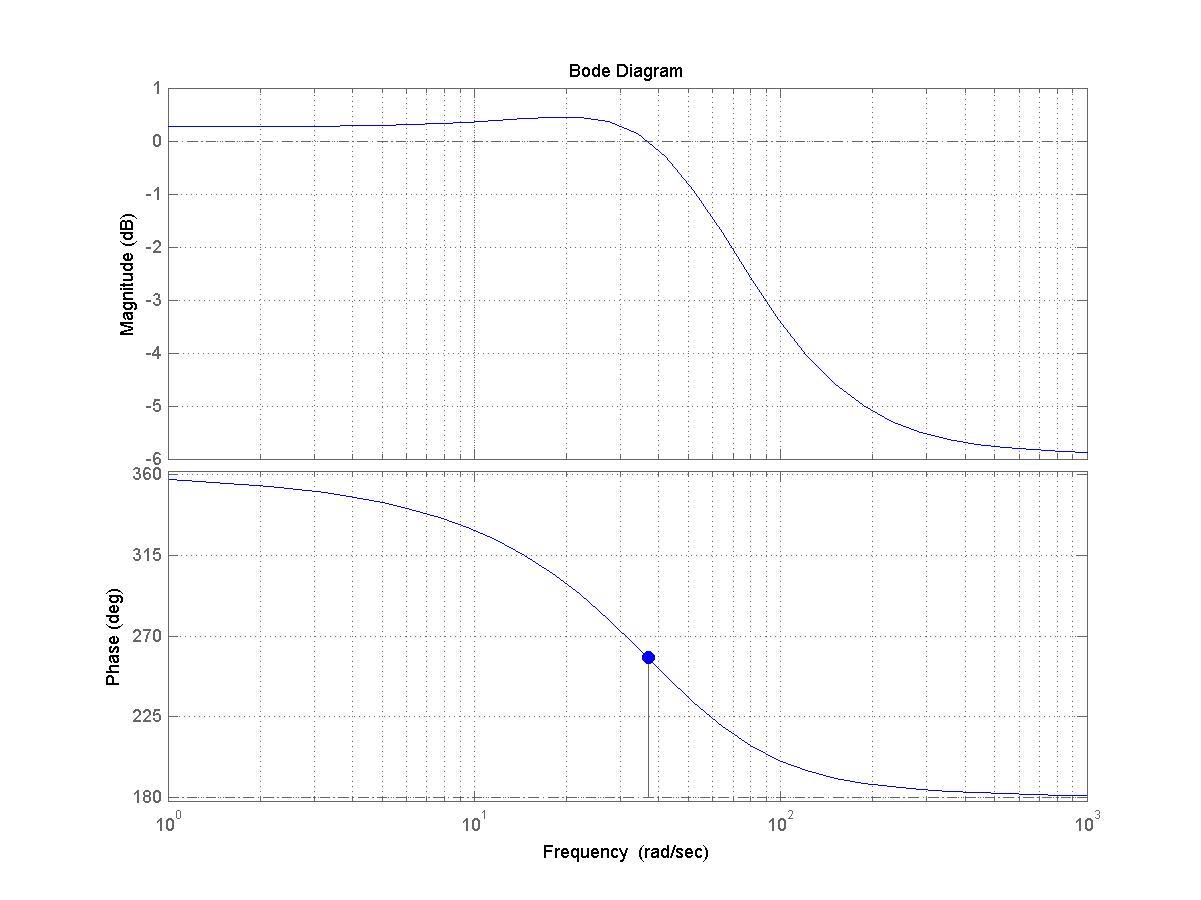
Рисунок 13 – ЛАЧХ и ЛФЧХ разомкнутой системы от псевдочастоты
По полученной ЛФЧХ и ЛАЧХ определяем запасы устойчивости по фазе и амплитуде. Опустив точку пересечения ЛАЧХ с осью lg(ω), получили, что запас устойчивости по фазе составляет 77,80. Запас устойчивости по амплитуде бесконечен, так как график фазочастотной характеристики не пересекает ось 1800. Полученное значение запаса устойчивости по фазе и амплитуде достаточны, следовательно, данная система устойчива.
Фактически система устойчива, имеет запасы устойчивости, небольшой коэффициент усиления, обеспечивающий заданную точность, и будет корректно работать. Но для нашей системы автоматического управления важны среднечастотные и высокочастотные области работы, которые данная система не отрабатывает. Для улучшения системы в среднечастотной области произведем коррекцию системы.