

Введение
Первым ЗРК, специально разработанным по требованиям Сухопутных войск, стал комплекс «Круг». Разработка первого подвижного зенитно-ракетного комплекса средней дальности для частей ПВО Сухопутных войск армейского и окружного (фронтового) подчинения была начата по Постановлению СМ СССР от 13 февраля 1958 года в НИИ-20, а в КБ-8 Свердловского СНХ (КБ свердловского завода №8, позднее СМКБ «Новатор») началось проектирование ракеты. С целью обеспечения возможности прикрытия войсковых и танковых соединений при движении по пресечённой местности все боевые единицы комплекса: РЛС обнаружения и целеуказания, РЛС сопровождения целей и наведения ракет, пусковые установки с ЗУР располагались на бронированных высокопроходимых гусеничных самоходных базах.
Зенитно-ракетный комплекс средней дальности 2К11 «Круг» (SA-4 “Ganef”) принят на вооружение ПВО сухопутных войск Постановлением СМ от 26 ноября 1964 года. Поступая на вооружение, комплекс «Круг» заменил ЗРК СА-75 и С-75, находившиеся на вооружение частей ПВО армейского подчинения.
1 ТЕХНИЧЕСКОЕ ЗАДАНИЕ
1.1 Цель курсовой работы
Целью данной курсовой работы является разработка САУ системы наведения наземной пусковой установки зенитно-ракетного комплекса «КРУГ». Данная система должна обеспечивать подъем ракетной платформы и учитывать возмущающие воздействия. Кроме того, система должна отвечать всем заданным в техническом задании параметрам, обеспечивая достаточное быстродействие, а самое главное – точность регулирования.
1.2 Технические характеристики САУ системы наведения наземной пус-
ковой установки зенитно-ракетного комплекса «КРУГ»
Для нормальной работы системы необходимо и достаточно, чтобы она удовлетворяла следующим техническим характеристикам:
- тип ЗУР 3М8;
- стартовая масса, кг 2250;
- масса БЧ, кг 196;
- длина, м 4,78;
- число одновременно наводимых ракет 1;
- макс. угол пуска ракеты, о 45;
- частота опроса датчиков, 1/с 10;
-скорость обработки сигнала 35;
- максимальная ошибка регулирования, % 0,3;
- время регулирование не более 10 секунд.
1.3 Функциональная схема сау системы наведения наземной пус-
ковой установки зенитно-ракетного комплекса «КРУГ»
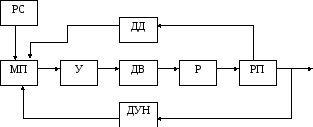
Информация о цели передается с радиолокационной базы на микропроцессор пусковой ракеты. Сигнал, обработанный микропроцессором поступает на вход усилителя, на выходе которого подается напряжение на двигатель. Вал двигателя, вращаясь с некоторой угловой скоростью ω, приводит в движение привод редуктора, который в свою очередь поднимает ракетную платформу на необходимый угол φ. Изменение угла подъема регистрируется инклинометром (датчиком угла подъема). Одновременно эта информация передается и в микропроцессор. В тот момент, когда будет достигнут необходимый угол подъема, микропроцессор передаст сигнал о прекращении работы двигателя и платформа остановится.
В системе также необходимо учитывать возмущающее воздействие, такое как ветер, давление. Для их учета установим в систему датчик относительного давления. Все датчики расположены на ракетной платформе.
Система должна согласовываться со схемой рисунок 1.
P
U1
U5 U2 U3 ω S φ
U4 φ
Рисунок 1 – Функциональная схема системы наведения
РС – радиолокационная станция; МП – микропроцессор;
У – усилитель; ДВ – двигатель; Р – редуктор;
РП – ракетная платформа; ДУН – датчик угла наклона,
ДД датчик давления
2 ВЫБОР И ОБОСНОВАНИЕ ВЫБОРА ЭЛЕМЕНТНОЙ БАЗЫ
ЛОКАЛЬНОЙ СИСТЕМЫ УПРАВЛЕНИЯ
2.1 Выбор микропроцессора
Одним из главнейших устройств в любой САУ можно считать устройство сравнения, от точности, проведенной им операции будет зависеть, на сколько точным окажется управление. Таким образом, следует достаточно тщательно подойти к выбору этого элемента.
Среди устройств автоматики наиболее широкое распространение получили микропроцессорные комплекты (МПК) серий К580, К583, К588. При выборе МПК следует руководствоваться следующими соображениями:
- высокая производительность МП, достаточный объем ОЗУ и ПЗУ;
- возможность цифровой обработки аналоговых сигналов в реальном масштабе времени;
- возможность программной коррекции;
- малое энергопотребление;
- доступность элементов;
- мощная и гибкая система команд МП;
- наличие встроенных ЦАП и АЦП.
На основании этих критериев выбираем МП серии К1813ВЕ1. Это однокристальный МП цифровой обработки аналоговых сигналов в реальном масштабе времени, со встроенными аналоговыми системами ввода-вывода (ЦАП и АЦП), с 8-ю разрядным ПЗУ, ОЗУ (емкостью 40х25 слов), ALU, двумя входными и четырьмя выходными аналоговыми каналами.
Этот МП выполнен по высококачественной n-МОП–технологии, совместим с БИС серии К580. В нем реализована мощная и гибкая система команд с расширенными возможностями адресации памяти.
Выбранный микропроцессор обладает необходимой производительностью, мощной и гибкой системой команд и управления обработкой информации, возможностью программной коррекции ЛСУ, совместим с БИС, и имеет возможность обрабатывать аналоговый сигнал в режиме реального времени благодаря встроенным АЦП и ЦАП.
2.1.1 Т е х н и ч е с к и е х а р а к т е р и с т и к и м и к р о п- р о ц е с с о р а
25-ти разрядное АLU;
16-ти разрядные ОЗУ (192х24 бит) и ПЗУ (40х25 слов);
время преобразования, мкс не более 50
нелинейность ЦАП и АЦП, % <0,1
тактовая частота, МГц 5
напряжение питания, В 2
потребляемая мощность, В*А 1,0
входное аналоговое напряжение не более, В 2
выходное сопротивление (хранение), кОм не менее 100
выходной ток, мА 0,4-2
входной ток не более, мА 2,0
диапазон рабочих температур, 0С от –10 до 70
2.1.2 Р а с ч е т п е р е д а т о ч н о й ф у н к ц и и м и к р о п-
р о ц е с с о р а
Передаточная функция цифрового устройства микропроцессор является стандартной W(p)=1.
2.2 Выбор двигателя
Для корректной работы устройства требуется двигатель постоянного тока большой мощности. Выбор двигателя будем вести исходя из требуемой мощности для подъема ракетной платформы.
Учитывая что ракета длинной l=4,78 м, массой m=2250 кг, временем максимального подъема платформы t=12 сек, то вычислим необходимую мощность:
P=F*l/t Вт (1)
где F=2250/0,102=22058 Н
Исходя из того, что максимальный угол подъема платформы 45о найдем центр масс ракеты и рассчитаем мощность.
P=22058*2,5/12~4,4 кВт.
На основе полученных данных выберем исполнительный двигатель типа МИ-52.
2.2.1 Т е х н и ч е с к и е х а р а к т е р и с т и к и д в и г а –
т е л я.
Мощность Рн, кВт 4,5
Скорость вращения nн, об/мин 1500
Напряжение Uн, В 220
Ток якоря Iн, А 2
Сопротивление цепи якоря Rд, Ом 0,26
КПД ηд, % 85
Момент инерции Jд, кгм2 0,15
2.2.2 Р а с ч е т п е р е д а то ч н о й ф у н к ц и и д в и г а – т е л я.
Передаточная функция исполнительного двигателя по углу поворота имеет вид (если пренебречь индуктивностью цепи якоря)
![]() (2)
(2)
где Кд - коэффициент усиления двигателя, рад/В*с :
Кд = ηн / Uн = 150/220 = 0,681
Тд - электромеханическая постоянная времени:
![]() (3)
(3)
В формуле (3) α=1,2 - постоянный коэффициент;
Jc - cуммарный момент инерции, приведенный к валу двигателя.
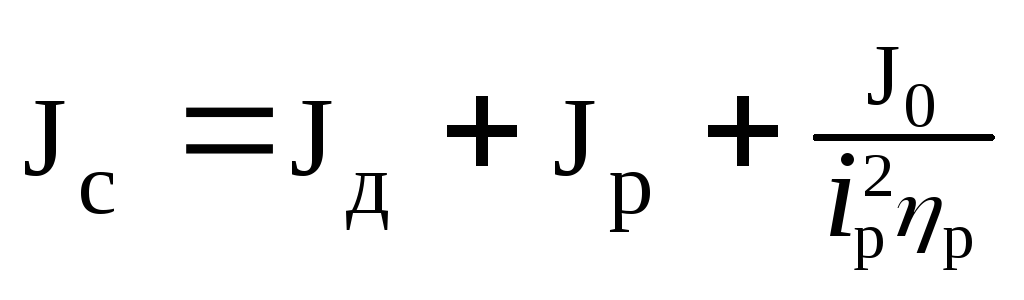 (4)
(4)
где
![]() (5)
(5)
![]() (6)
(6)
где ωн = πnн/30 – скорость вращения вала двигателя
Нагрузочные характеристики двигателя:
Jо=5000 кг.м2; Мос= 8500 Нм;
ωоmax= 0,8 с-1;
ξomax= 1,42 с-2 ;
ηр = 0,72.
Оптимальное передаточное число редуктора iр
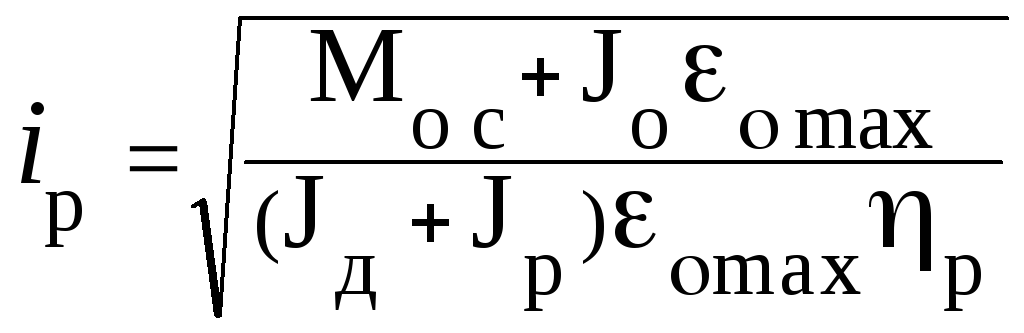 (7)
(7)
Jр = 1*10-4 кг.м2 - момент инерции редуктора
![]()
![]() кг*м2
кг*м2
где Мн номинальный момент двигателя, Н*м
Мн = 9,55Рн/nн = 9,55*4500/1500 = 28,65 Н*м
Согласно формулам (5) и (6) вычислим коэффициенты двигателя
![]()
![]()
Рассчитаем электромеханическую постоянную времени по формуле (3)
![]() с
с
Тогда передаточная функция исполнительного двигателя равна:
![]()
2.3 Выбор операционного усилителя
Выбор усилителя мощности производится по следующим показателям:
- вид входного и выходного сигнала, тип питания;
- требуемая мощность;
- надежность, независимость от внешних влияний (особенно коэффициента усиления), чувствительность, малые массогабариты.
Номинальная мощность усилителя должна удовлетворять неравенству
Рун Рн / ηд ,
Исходя из того, что выходное напряжение микропроцессора равно 2В, выбираем высоковольтный и мощный операционный усилитель типа 157УД1.
2.3.1 Т е х н и ч е с к и е х а р а к т е р и с т и к и у с и л и т е л я.
Напряжение питания, В ±3, ±20.
Входной ток, мА 0,5.
Коэффициент усиления, В/мВ 110.
Диф. входное сопротивление, Мом 1.
Скорость нарастания выходного напряжения, В/мкс 0,5.
Максимальный выходной ток, А 2.
Выходное сопротивление, Ом 10.
Примечание Тепловая защита от перегрузки.
2.3.2 Р а с ч е т п е р е д а т о ч н о й ф у н к ц и и у с и л и - т е л я.
Также как и любое стандартное усилительное (пропорциональное звено), данный усилитель обладает постоянным передаточным числом, или
![]()
2.4 Выбор редуктора
Редуктор предназначен для передачи механической энергии от электродвигателя к исполнительному органу системы и согласования скоростей вращения. Для системы необходим червячный редуктор с высокой точностью.
Передаточное число редуктора было определено в пункте 2.2.2 и равно 322,5. Округляем его до ближайшего по ГОСТ стандартного значения для редукторов 320.
Так как передаточное число достаточно велико, то выбираем червячный редуктор Ч – 60 (как наиболее отвечающий массогабаритным требованиям к проектируемому регулятору при данном передаваемом моменте).
2.4.1 Т е х н и ч е с к и е х а р а к т е р и с т и к и р е д у к –
т о р а.
Допустимый крутящий момент, кгс*м 8,5.
КПД, % 50. Допустимая нагрузка, кгс 800.
Масса, кг 5,6.
Межосевое расстояние, м 0,3.
Передаточное число 360.
2.4.2 Р а с ч е т п е р е д а т о ч н о й ф у н к ц и и р е д у к –
т о р а.
Требуемый коэффициент передачи составляет:
![]()
2.5 Выбор датчика угла наклона
В системе для корректной работы необходимо измерять угол подъема ракетной платформы. Устройство, предназначенное для измерения угла наклона называется инклинометром.
В данной установке обязательными критериями выбора инклинометра являются: счет угла подъема до 450, погрешность датчика не более 0,3%, малые габариты датчика, ударопрочный корпус.
Исходя из вышеперечисленных критериев выберем инклинометр ДК1-В. Инклинометр спроектирован так, что имеет линейную зависимость выходного сигнала от угла наклона в одной - так называемой рабочей плоскости и практически не изменяет показания в другой (нерабочей) плоскости, при этом его сигнал слабо зависит от изменения температуры.
2.5.1 Т е х н и ч е с к и е х а р а к т ер и с т и к и и н к л и н о -м е т р а.
Полный диапазон ±60°(120°).
Линейный диапазон ±45°(0°- 90°).
Порог чувствительности 0.001°.
Диапазон рабочих температур, °С -40 ... +60.
Погрешность при поперечном наклоне до 45° ±0.1%.
Постоянная времени прибора 0,015.
Полоса пропускания (-3dB), Гц 3.
Температурный коэффициент “0” 0,01%/°С.
Длительная стабильность (10000 часов) ±0,15%.
2.5.2 Р а с ч е т п е р е д а т о ч н о й ф у н к ц и и и н к л и -н о м е т р а.
Значение максимального тока соответствует значению максимального угла подъема. Исходя из того, что график работы инклинометра - линейная характеристика, то передаточная функция звена будет равна:
![]() (8)
(8)
где Т - постоянная времени прибора;
k = U3/φ (9)
U3 – выходное напряжение инклинометра, В;
φ – линейный диапазон инклиномера, рад;
k = 10/ 0,7= 1,42
Тогда передаточная функция инклинометра равна:
![]()
2.6 Выбор датчика давления
В системе необходимо учитывать возмущающее воздействие, такое как давление и ветер. Для этого вводим в систему цифровой манометр давления.
2.6.1 Т е х н и ч е с к и е х а р а к т е р и с т и к и м а н о -
м е т р а.
Диапазон давления, бар 0 – 1, 2, 7, 20, 30, 70, 140, 200, 300, 700.
Точность: ± 0,1% ИВ в диапазоне 20-100% шкалы.
±0,02%ВПИ в диапазоне 0-20% шкалы.
Разрешение, бар от 0,01 до 0,0001.
Постоянная времени прибора 0,05.
Питание батарейки 3* АА (RS6).
Рабочая температура, °С -10 … +50°С .
2.5.2 Р а с ч е т п е р е д а т о ч н о й ф у н к ц и и м а н о -
м е т р а.
Исходя из того, что график работы манометра - линейная характеристика, то передаточная функция звена будет равна:
![]() (10)
(10)
где Т - постоянная времени прибора;
k = U3/φ (11)
U3 – выходное напряжение инклинометра, В;
φ – линейный диапазон манометра, рад;
k = 3 / 5= 0,58
Тогда передаточная функция манометра равна:
![]()
2.7 Передаточная функция ракетной платформы
Ракетная платформа в системе представляет собой инерционное звено, передаточная функция которой равна:
![]() (12)
(12)
где Т = φвых / φвх = 0,099
Тогда передаточная функция платформы будет иметь вид:
![]()
2.8 Передаточная функция САУ наведения наземной пусковой уста-
новки зенитно-ракетного комплекса «КРУГ»
Система рисунок 1, с учетом полученных передаточных функций, может быть представлена в виде рисунок 2.
![]()




1
110
0,003
![]()
![]()







![]()


Рисунок 2 – Структурная схема системы наведения наземной пусковой
установки зенитно-ракетного комплекса «КРУГ»
Передаточную функцию всей системы получим путем перемножения передаточных функций последовательных звеньев системы и сложения параллельных звеньев.
 (13)
(13)
Проведем преобразование полученной формулы (13) при помощи пакета Mathcad и получим передаточные функции замкнутой и разомкнутой системы:
![]() (14)
(14)
![]() (15)
(15)
3 РАСЧЕТ ДАТЧИКА ОБРАТНОЙ СВЯЗИ
3.1 Классификация приборов измерения механических величин
В данной системе датчиком обратной связи является прибор измерения механических величин. Проведем классификацию этих приборов.
Приборы измерения
механических величин

Преобразователи
положения

Преобразователи
вибрации
Преобразователи
углов поворота
(энкодеры)



Преобразователи
угловых
перемещений
Преобразователи
углов наклона
(инклинометры)


Преобразователи
линейных
перемещений



Индуктивные
Преобразователи
угловой
скорости
Дифференциаль-ные
емкостные


Фотоэлектрические

Рисунок 3 - Классификация приборов измерения механических величин
Преобразователи положения предназначены для преобразования информации о местонахождении объектов, перемещающихся относительно чувствительного элемента преобразователя, в дискретный электрический сигнал. Максимальная частота срабатывания преобразователя при активной нагрузке не менее 1 кГц.
Преобразователи измерительные линейных и угловых перемещений предназначены для получения информации в виде аналогового электрического сигнала о линейном или угловом положении или перемещении подвижных органов исполнительных механизмов и используются в устройствах цифровой индикации и программного управления в измерительной технике, станкостроении, робототехнике, судостроении и т. п. Тип преобразователя — синусно-косинусный.
Преобразователи круговых перемещений предназначены для преобразования информации о величине и направлении перемещения рабочих органов станков, машин, приборов и других в электрический сигнал. Принцип действия преобразователя основан на модуляции светового потока растровым сопряжением, состоящим из подвижного и неподвижного лимбов с равными угловыми шагами и совмещенными центрами. Модулированный перемещением световой поток на фотоприемнике преобразуется в аналоговый электрический сигнал и поступает в нормирующий электронный блок, в котором происходит преобразование аналогового сигнала в цифровой.
Исходя из выше приведенной классификации будем использовать дифференциальный емкостной инклинометр.