

7 Расчёт корректирующего устройства. Использование дискретного корректирующего устройства
По ЛАЧХ КУ (рисунок 9) строится передаточная функция последовательного непрерывного корректирующего устройства
(7.1)
Проектируемая ЛСАУ является электрической поэтому реализацию КУ целесообразно выполнять на электрических элементах в виде пассивных четырёхполюсников. Для проектирования КУ по выражению (7.1), необходимы два вида пассивных четырёхполюсника. Принципиальная схема интегрирующего представлены на рисунке 11.

Рисунок 11– Схема электрическая принципиальная интегрирующего звена КУ
Передаточная функция интегрирующего звена
(7.2)![]()
ЛАЧХ интегрирующего звена представляет собой прямую с наклоном -20 дБ/дек.
Следующее электрическая схема представляет собой четырёхполюсник вид которого на рисунке 12.

Рисунок 12 – Схема электрическая принципиальная части КУ
Передаточная функция КУ с принципиальной схемой по виду рисунка 12.
(7.3)
где
 - коэффициент передачи;
- коэффициент передачи;
 - постоянная времени форсирующего звена;
- постоянная времени форсирующего звена;
![]() - постоянная времени апериодического
звена.
- постоянная времени апериодического
звена.
ЛАЧХ КУ по принципиальной схеме рисунка 12 представляет собой ломанную прямую с последовательными наклонами 0,+20, 0 дБ/дек.
Составляется передаточная функция КУ.
(7.4)
Оценим коэффициенты и постоянные времени
(7.5)
(7.6)
Интегрирование осуществляется при достаточно большой постоянной времени интегрирования, поэтому выберем значения параметров следующими
(7.7)
(7.8)
(7.9)
(7.10)
(7.11)
(7.12)
(7.13)
(7.14)
(7.15)
(7.16)
(7.17)
(7.18)
(7.19)
(7.20)
(7.21)
(7.22)
(7.23)
(7.24)
(7.25)
(7.26)
(7.27)
(7.28)
(7.29)
(7.30)
(7.31)
(7.32)
(7.33)

(7.34)
(7.35)
(7.36)
(7.37)
(7.38)
(7.39)
Т
(7.40)
(7.41)
Н
(7.42)
![]()
Реализуется такой коэффициент усиления при
(7.43)
(7.44)
(7.45)
Дискретное корректирующее устройство реализуется в виде программа для МПС. Для получения программы необходимо конечноразностное уравнение.
Передаточная функция корректирующего устройства
(7.46)
Проводится обратное билинейное преобразование
(7.47)![]()
(7.48)![]()
Или
(7.49)
Р
(7.50)

По полученному выражению записывается разностное уравнение в реальном масштабе времени, введя в числитель дополнительный сдвиг на z-1
(7.51)
Для реализации выражения в виде программы МПС необходимо коэффициенты при входных и выходных сигналах записать в ПЗУ. При включении МПС происходит чтение выходного Y и входного Х сигналов за четыре и пять тактов машинного времени соответственно. Имея постоянные коэффициенты и входные и выходные сигналы программа вычисляет выходную величину Y в k – ый такт машинного времени. После чего программа выдаёт корректирующий сигнал на выходной порт МПС. Далее программа считывает новые значения Yk-1 и Xk-1 и опять формирует корректирующий сигнал.
Блок-схема программы дискретного КУ по выражению (7.51) приведён на рисунке 13.
Вывод в порт Yk

Рисунок 13 – Блок-схема программы дискретного КУ
Заключение
В результате анализа ТЗ был осуществлён подбор элементов для проектируемой локальной системы глубоководного манипулятора бурения донной поверхности для взятия проб грунта; произведён анализ работы дискретной ЛСАУ. Выявленные недостатки первоначально спроектированной ЛСАУ были устранены путём ввода в систему рассчитанного КУ. Была произведена разработка алгоритма программы дискретного КУ на базе МПС.
Технические характеристики спроектированной локальной системы совпадают с техническими требованиями.
Была решена основная задача курсовой работы – развитие и закрепление навыков самостоятельной работы при решении конкретной задачи разработки микропроцессорного устройства.
Список литературы
1 Анфимов М.И. Редукторы. М.: Машиностроение – 1975 г.-105 с.
2 Бесекерский В.А., Попов Е.П. Теория систем автоматического регулирования., M.: Наука – 1972 г. -768 с.
3 Гурин М.Т. Электрические машины., М.: Энергия -1987 г.-356 с.
4 Дикарева А.А., Мирская М.И. Справочник по радиоэлектронным приборам., М.: Энергия – 1989 г.-143с.
5 Иващенко Н.Н. Автоматическое регулирование., М.: Наука – 1973 г.-324 с.
6 Сорокин П.В. Вычислительные комплексы. М.: Высшая школа – 1992 г.-323с.
7 Топчеев Ю.И. Атлас для проектирования систем автоматического регулирования., М.: Машиностроение -1989 г.-752с.: ил.
8 Хвощ С.Т. Микропроцессоры и микроЭВМ в САУ: Справочник/ С.Т. Хвощ, Н.Н. Варлинский, Е.А. Попов; Под ред. С.Т. Хвоща. – Л: Машиностроение, 1987.
9 Чиликин М.Г. Общий курс электропривода., М.: Энергия – 1971 г.-432 с.: ил.
Приложение А
(обязательное)
1 Классификация двигателей 46
2 Классификация датчиков скорости 47
Рисунок А1 – Классификация двигателей
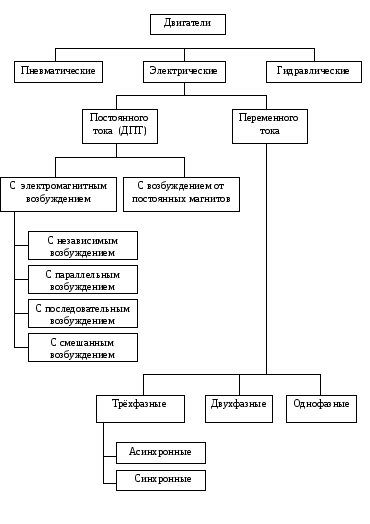
Рисунок А2 - Классификация датчиков скорости
Датчики угловой скорости
Датчики скорости
Датчики линейной скорости
Индуктивный датчик скорости при малых
перемещениях
Индуктивный датчик скорости при больших
перемещениях
Механические тахометры
Центробежный тахометр с грузиками
Центробежный тахометр с кольцевым
грузом
Вибрационный тахометр
Фрикционный тахометр
Часовой тахометр
Гидравлический центробежный тахометр
с грузиками
Магнитные тахометры
Магнитные тахометры
Дистанционные магнитные тахометры
Электрические тахометры постоянного
тока
Тахогенератор и вольтметр
Тахометрическая мостовая схема с
электродвигателем постоянного тока
Электрические тахометры
Импульсные электротахометры
Гетеродинные тахометры с низкочастотными
опорными кварцами
Электронные быстродействующие
тахометры-счетчики
Электрические тахометры переменного
тока
Мостовой конденсаторный тахометр
Импульсный конденсаторный тахометр
































ПРИЛОЖЕНИЕ Б
(обязательное)
1 Характеристики и состав ЛСАУ 49
2 Датчик обратной связи 50
3 ЛАЧХ дискретной системы 51
4 ЖЛАЧХ и ЛАЧХ КУ 52
5 Корректирующее устройство 53
6 Дискретное КУ 54