

4 Расчет передаточной функции системы. Определеие устойчивости
Преобразуем функциональной схемы, представленную в соответствии с рисунком 1, в структурную схему на основе передаточных функции полученных в пункте 2. Структурная схема локальной системы автоматического управления громкостью звука с рисунком 8.

Рисунок 8 – Структурная схема САУ громкостью звука
Передаточная функция микрофона имеет вид:
![]() (60)
(60)
Передаточная функция промежуточного усилителя имеет вид:
![]() (61)
(61)
Передаточная функция микропроцессора имеет вид:
![]() (62)
(62)
Передаточная функция делителя напряжения имеет вид:
![]() (63)
(63)
Передаточная функция усилителя мощности звуковой частоты имеет вид:
![]() (64)
(64)
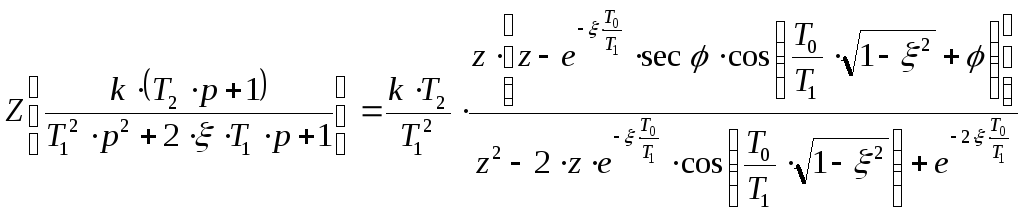
Передаточная функция акустической системы имеет вид:
![]() (65)
(65)
Выделим в структурой схеме изменяемую и неизменяемую части системы автоматического управления. Изменяемая часть состоит из ЭВМ, в состав которой входят микропроцессор, АЦП и ЦАП. Неизменяемая часть состоит из микрофонов, промежуточных усилителей, делителя напряжения, УМЗЧ и акустической системы.
Передаточная функция замкнутой системы имеет вид:
![]() (66)
(66)
Преобразование данной передаточной функции в программе MathCAD:
![]() (67)
(67)
Характеристическое уравнение передаточной функции в замкнутом состоянии имеет вид:
![]() (68)
(68)
Проверим устойчивость неизменяемой части системы автоматического управления громкостью звука. Так как характеристическое уравнение системы имеет высокий порядок, то проверку устойчивости проведем, используя критерий Михайлова.
Для того, чтобы систему можно было считать устойчивой по Михайлову, необходимо и достаточно, чтобы вектор D(j), описывающий своим концом кривую Михайлова при изменении частоты от 0 до +, начав свое движение с положительной действительной оси и вращаясь против часовой стрелки последовательно проходил n квадрантов, нигде не обращаясь в 0 [13].
В характеристическом уравнении сделаем
замену
![]() :
:
![]() (69)
(69)
Выделим действительную и мнимую части:
![]() (70)
(70)
На плоскости U, jV кривая Михайлова будет иметь следующий вид.
U(ω) jV(ω)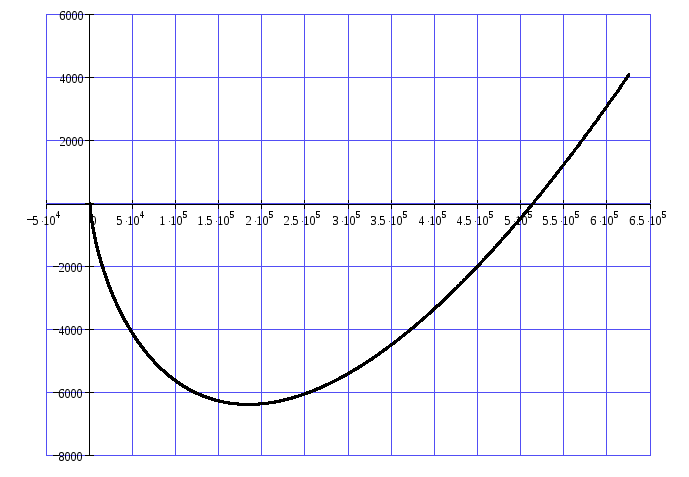

Рисунок 9 – Кривая Михайлова замкнутой САУ
jV(ω)
U(ω)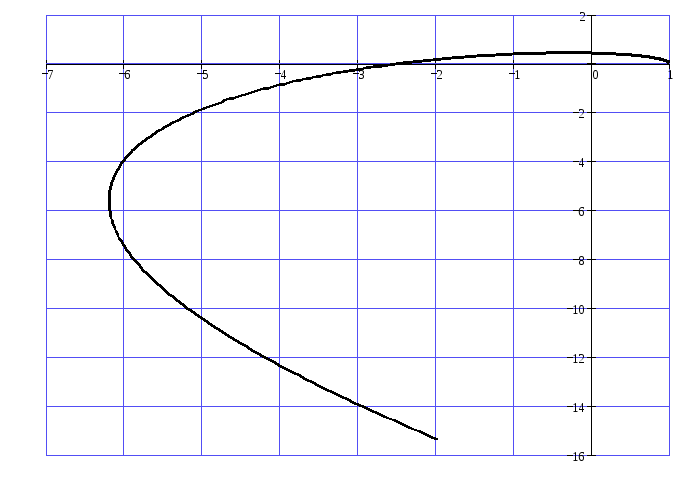

Рисунок 10 – Фрагмент кривой Михайлова
для
![]()
В данном случае кривая Михайлова начинается в точке (1,0), т.е. на положительной действительной оси, и уходит в бесконечность в 5-м квадранте, двигаясь к которому против часовой стрелки, нигде не обращается в 0. Следовательно, систему можно считать устойчивой по критерию Михайлова.
Построение переходного процесса САУ регулирования громкостью звука выполняется на основе обратное преобразования Лапласа от передаточной функции системы автоматического регулирования в замкнутой форме. Преобразование по Лапласу от передаточной функции системы автоматического регулирования в замкнутой форме осуществляется в программе MathCAD:
 (71)
(71)
П
h(t)
t, c hуст tmax tр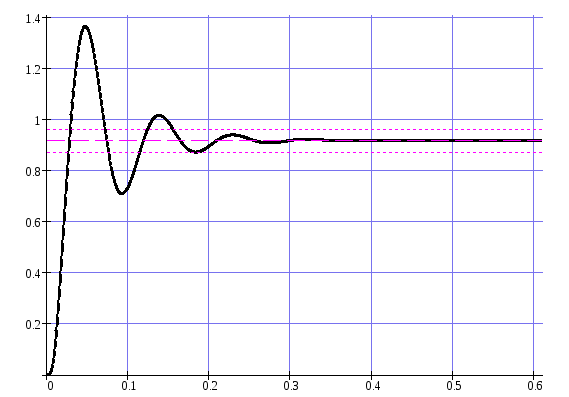


Рисунок 11 - График переходного процесса системы
По графику рисунка 11, определим показатели качества системы автоматического управления:
- установившееся значение выходной величины:
![]()
- перерегулирование, %:
![]()
- колебательность системы, то есть число колебаний регулируемой величины за время переходного процесса:
![]()
- время нарастания (время, за которое регулируемая величина достигает установившегося значения), с:
![]()
- время достижения максимального значения, с:
![]()
- время регулирования, с:
![]()
Косвенные оценки качества, осуществляются по графику амплитудно-частотной характеристики исходной системы. Амплитудно-частотная характеристика исходной системы автоматического регулирования представлена в соответствии с рисунком 12.
A(ω) ω,
Гц ωp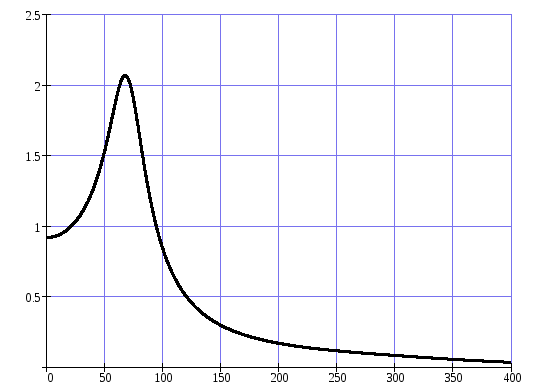

Рисунок 12 - АЧХ исходной системы автоматического регулирования
По графику рисунка 12 определяем максимальное отклонение входного сигнала равное Амах(ω) = 2.05, А(0) = 0,92.
Колебательность системы определяется по формуле:
![]() (72)
(72)
Резонансная частота – частота, в которой АЧХ достигает своего максимального значения. Максимальное значение АЧХ величины будет Аmax. Этому значению соответствует частота, которая равна:
![]() Гц.
Гц.
Вывод: локальная система автоматического управления громкостью звука является устойчивой, так как из анализа графика переходного процесса система имеет установившееся состояние hуст(t) = 0,92 и по частотному критерию устойчивости Михайлова система также устойчива.
Проверка устойчивости локальной системы регулирования с учетом микропроцессора выполняется на основании критерия устойчивости Шур - Кона, который позволяет анализировать устойчивость дискретных и дискретно-непрерывных систем по характеристическому уравнению замкнутой системы, записанному в форме z-преобразования.
Замкнутая система будет устойчива, если корни характеристического уравнения будут находиться внутри единичной окружности, т.е., если коэффициенты уравнения будут удовлетворять всем определителям Шур - Кона, имеющих отрицательные значения для нечетных определителей и положительных для четных.
Переход от операторной формы записи передаточной функции замкнутой системы к z-форме и расчет определителей Шур - Кона осуществляется при помощи математического редактора MathCAD.
Разложим передаточную функцию замкнутой САУ на простые дроби:

Переход от операторной формы к z –форме выполняется по формуле:
![]() ,
(73)
,
(73)
где δ1 - разрядность АЦП;
δ2 - разрядность ЦАП;
W(z)мп – z-преобразованная передаточная функция микропроцессора;
![]() - фиксатор нулевого порядка;
- фиксатор нулевого порядка;
![]() -
z-преобразование для
непрерывной части замкнутой САУ без
учета МП.
-
z-преобразование для
непрерывной части замкнутой САУ без
учета МП.
Для используемого в системе микропроцессора:
![]() .
.
Проведём z-преобразование, учитывая период дискретизации. Период дискретизации Т0 задается, считается, что чем меньше Т0, тем лучше, но из-за неоправданного уменьшения Т0 резко возрастает сложность системы. Рекомендуется выбирать Т0=1/20Тmin. Для проектируемой системы Т0=0,01 сек.
Z-преобразование, проводится по формулам [14].
 (74)
(74)
 (75)
(75)
где
 .
.
Тогда передаточная функция замкнутой САУ в форме z-преобразований запишется в виде:
![]() (76)
(76)
Перейдем к псевдочастоте, сделав подстановку:
![]() ,
,
где
![]() .
.
Тогда, преобразовав в программе Mathcad выражение (76), получим передаточную функцию для замкнутой системы с учетом микропроцессора:
![]() (77)
(77)
Характеристическое уравнение:
![]()
![]() (78)
(78)
Определитель Шур - Кона имеет вид:

Для устойчивости системы необходимо, чтобы все нечетные определители были меньше 0, а все четные – больше 0.
Составим и вычислим, используя программу Mathcad, четные и нечетные определители Шур-Кона.
![]()

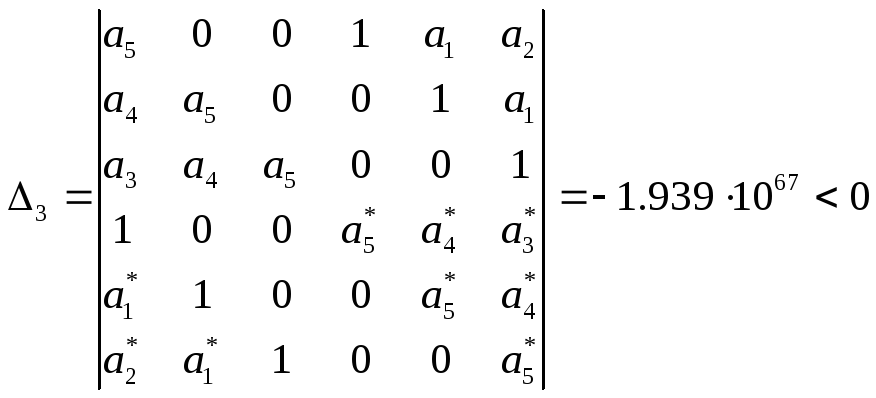

Вывод: так как
![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
следовательно, САУ управления громкостью
звука с учетом микропроцессора является
устойчивой.
,
следовательно, САУ управления громкостью
звука с учетом микропроцессора является
устойчивой.