

Контрольные задания
Выполнить необходимые расчёты для построения аппроксимирующей функции вида
![]() ,
,
которая описывает экспериментальные данные, приведённые на графиках в количестве 12-ти точек (см. рис.5–14). Для построения аппроксимирующей функции выбрать три базисные функции из четырёх, заданных в таблице 1. Для этого перебрать все возможные варианты формирования аппроксимирующей функции и обосновать свой выбор лучшего варианта. Построить график аппроксимирующей функции вместе с экспериментальными точками. Записать аппроксимирующую функцию с найденными коэффициентами.
|
|
|
|
Рис.5. |
Рис.6. |
|
|
|
|
Рис.7. |
Рис.8. |




|
|
|
|
Рис.9. |
Рис.10. |
|
|
|
|
Рис.11. |
Рис.12. |
|
|
|
|
Рис.13. |
Рис.14. |






Таблица 1. Варианты базисных функций 1(x), 2(x), 3(x) и 4(x).
|
Варианты 1–3 (Рис.5) |
Варианты 16–18 (Рис.10) |
||
|
1 |
|
|
|
|
2 |
|
|
|
|
3 |
|
|
|
|
Варианты 4–6 (Рис.6) |
Варианты 19–21 (Рис.11) |
||
|
4 |
|
|
|
|
5 |
|
|
|
|
6 |
|
|
|
|
Варианты 7–9 (Рис.7) |
Варианты 22–24 (Рис.12) |
||
|
7 |
|
|
|
|
8 |
|
|
|
|
9 |
|
|
|
|
Варианты 10–12 (Рис.8) |
Варианты 25–27 (Рис.13) |
||
|
10 |
|
|
|
|
11 |
|
|
|
|
12 |
|
|
|
|
Варианты 13–15 (Рис.9) |
Варианты 28–30 (Рис.14) |
||
|
13 |
|
|
|
|
14 |
|
|
|
|
15 |
|
|
|
6. Решение задачи коши для обыкновенных дифференциальных уравнений 1-го порядка Справочная информация
Обыкновенное дифференциальное уравнение 1-го порядка
![]()
с вязывает
независимую переменную x,
искомую функцию y
и её производную. Решение дифференциального
уравнения заключается в отыскании
функции y
= y(x),
обращающей это уравнение в тождество
на конечном или бесконечном интервале
(a,
b).
Различают общее и частные решения
дифференциального уравнения. Общее
решение уравнения имеет вид
вязывает
независимую переменную x,
искомую функцию y
и её производную. Решение дифференциального
уравнения заключается в отыскании
функции y
= y(x),
обращающей это уравнение в тождество
на конечном или бесконечном интервале
(a,
b).
Различают общее и частные решения
дифференциального уравнения. Общее
решение уравнения имеет вид
y = y(x, C),
г
Рис.1.
![]() .
.
Такая постановка задачи отыскания решения дифференциальных уравнений называется задачей Коши (A.L.Cauchy, 1789–1857). Для существования единственного решения задачи Коши необходимо и достаточно существование и ограниченность правой части дифференциального уравнения f(x, y) и её частной производной f(x, y)/y в некоторой окрестности начальной точки (x0, y0).
Для численного
решения задачи Коши существует множество
методов, которые условно делятся на две
группы: одношаговые и многошаговые. Все
эти методы позволяют получить искомое
решение дифференциального уравнения
в виде таблично заданной функции, в т
Рис.2.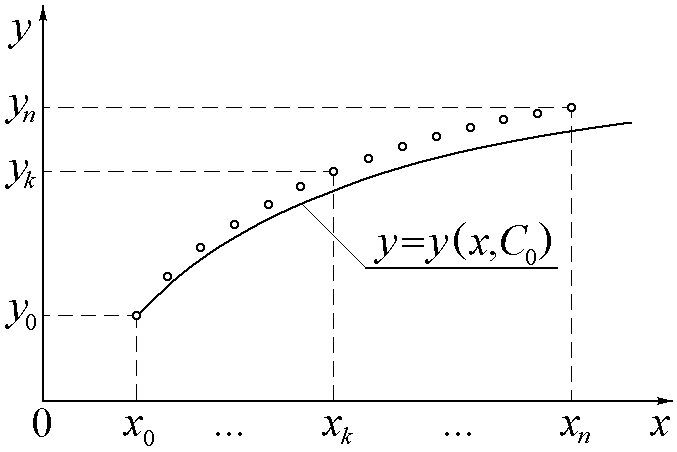 ой
или иной мере согласующееся с истинным
частным решением (см. рис.2). Эти группы
методов различаются объёмом информации,
которая используется для вычисления
координат очередной точки табличной
функции. Одношаговые методы используют
значения функции и
ой
или иной мере согласующееся с истинным
частным решением (см. рис.2). Эти группы
методов различаются объёмом информации,
которая используется для вычисления
координат очередной точки табличной
функции. Одношаговые методы используют
значения функции и
Метод Эйлера (L.Euler, 1768)
Он является старейшим методом решения задачи Коши и заключается в последовательном применении следующих формул
![]()
 ,
,
![]() ,
,
![]() ,
,
г
Рис.3.
![]() ,
,
![]() .
.
Метод Эйлера относится к методам первого порядка точности, поскольку его решение совпадает с истинным только в том случае, когда последнее является линейной функцией y = a1+ a2x. Его абсолютная погрешность εабс(xk+1, h) на каждом шаге пропорциональна величине h2. Это обусловлено тем, что в качестве направления, определяющего положение следующей точки численного решения, используется касательная в левой точке каждого отрезка [xk, xk+1]. На рис.3 видно, что для получения более точного численного решения недостаточно знания параметров функции в единственной левой точке отрезка [xk, xk+1]. Требуется собрать дополнительную информацию о её поведении на отрезке интегрирования для отыскания решения при x = xk+1 с меньшей погрешностью. Для этого можно использовать некоторые промежуточные направления, определяемые касательными к графику неизвестного точного решения в характерных точках рассматриваемого отрезка (крайние точки, середина отрезка и т.д.).