

7.3 Программная коррекция
Для создания программы осуществляющей коррекцию согласно уравнению требуется найти разностное уравнение в реальном масштабе времени.
Проведем обратное
биполярное преобразование передаточной
функции корректирующего устройства,
для этого заменим
![]() :
:
![]() (70)
(70)
![]() (71)
(71)
Далее заменяем
![]()
![]() (72)
(72)
Запишем разностное уравнение в реальном масштабе времени. Из числителя коэффициенты берутся с противоположным знаком.
![]() (73)
(73)
Таким образом, получили уравнение коррекции. Составим программу на языке Ассемблер на основе полученного уравнения.
; расчет формулы
; U1(K)=10.33U(K) - 8.33U(K-1) - 2.23U1(K) +0.23U1(K)
A1 EQU 10.33; задаем
A2 EQU 8.33; постоянные
A3 EQU 2.23; коэффициенты
A4 EQU 0.23;
U1 DB 0; выделение места под U(K)
U2 DB 0; выделение места под U(K-1)
U3 DB 0; выделение места под U1(K)
U4 DB 0; выделение места под U1(K-1)
i port EQU 10h
port EQU 12h
start:
in al, i port;
MOV al,U1;
MUL al,A1; 10,33U(K)
MOV bl,al;
MOV al,U2;
MUL al,A2;
SUB bl,al; 10.33U(K) - 8.33U(K-1)
MOV al,U3;
MUL al,A3;
SUB bl,al; 10.33U(K) - 8.33U(K-1) - 2.23U1(K)
MOV al,U4;
MUL al,A4;
ADD bl,al; 10.33U(K) - 8.33U(K-1) - 2.23U1(K) + 0.23U1(K-1)
MOV U1,bl;
MOV U2,U1;
out o port,bl;
JMP start; замыкание цикла.
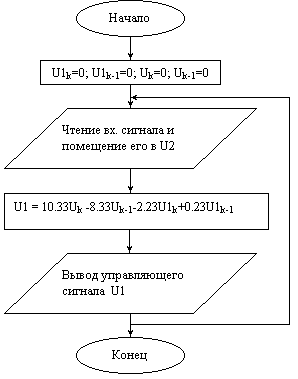
Рисунок 17 – Блок-схема программы коррекции
З
Разработанная система отвечает требованиям технического задания. Для нее были построены ЛАЧХ, ЖЛАЧХ и ЖФЧХ. С помощью методов синтеза по ЛАЧХ скорректированной системы было разработано корректирующее устройство, приводящее параметры системы к заданным в техническом задании. Оценка запасов устойчивости скорректированной системы показала, что разработанная система имеет достаточный запас устойчивости по фазе и амплитуде. Коррекция системы управления кухонным комбайном была выполнена двумя способами: при помощи RC-цепочки и корректирующей программы. Наиболее предпочтительным является программный метод, так как RC-цепочка требует непосредственного включения в систему и создает дополнительные помехи.