

6 Построение жлачх системы и её анализ
Желаемой называют асимптотическую ЛАЧХ разомкнутой системы, имеющей желаемые (требуемые) статические и динамические свойства. Желаемая ЛАЧХ (ЖЛАЧХ) состоит из трех основных асимптот: низкочастотной, среднечастотной и высокочастотной. Среднечастотная асимптота ЛАЧХ разомкнутой системы и ее сопряжение с низкочастотной определяют динамические свойства системы – устойчивость и показатели качества переходной характеристики.
Поскольку в исходной САУ присутствует дискретное устройство, построение желаемой ЛАЧХ ведется методом запретной зоны.
Построение ЖЛАЧХ начинаем с построения запретной зоны, для чего необходимо найти координаты рабочей точки, для этого нужны следующие данные:
Найдем значение частоты рабочей точки:

где
 - скорость изменения входного сигнала;
- скорость изменения входного сигнала;
 -
ускорение изменения.
-
ускорение изменения.
Найдем значение амплитуды рабочей точки:

где
 - допустимая ошибка.
- допустимая ошибка.
Таким образом, рабочая точка имеет следующие координаты:

Через
полученную точку
 проводим прямую с наклоном -20 дБ/дек.
Эта прямая является верхней границей
запретной зоны. Соответственно желаемая
ЛАЧХ должна проходить выше этой зоны.
проводим прямую с наклоном -20 дБ/дек.
Эта прямая является верхней границей
запретной зоны. Соответственно желаемая
ЛАЧХ должна проходить выше этой зоны.
По номограмме Солодовникова (рисунок 10) по заданным в техническом задании желаемому перерегулированию 35% и времени регулирования 0,2 c определяем частоту среза и колебательность.
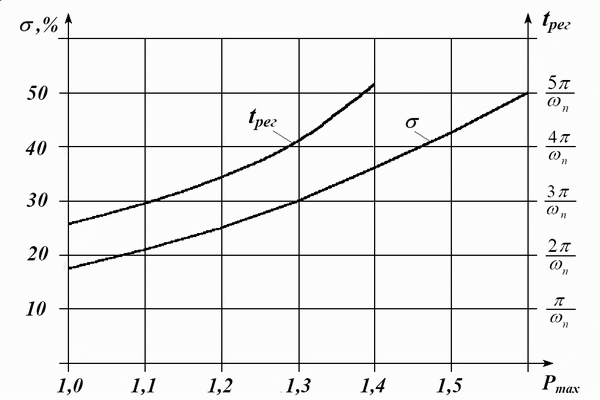
Рисунок 10 – Номограмма Солодовникова


Перейдем к псевдочастоте.

 ,
,
где Т0=0.2 с – период дискретизации

По заданной колебательности М=1.38 найдем среднечастотную область построения ЖЛАЧХ. Границами для амплитуды этой области соответствуют значения бесконечности.


Наклон ЖЛАЧХ в среднечастотной области должен быть -20 дБ/дек, через частоту среза в этой области проводим прямую с наклоном -20 дБ/дек. В высокочастотной области ЖЛАЧХ сопрягается с исходной ЛАЧХ, то есть будет иметь такие же наклоны. Низкочастотная область не имеет большого значения, поэтому достраивается произвольно, в данном случае – с тем же наклоном, что и ЛАЧХ для упрощения корректирующего устройства.
Построить ЛАЧХ корректирующего устройства можно с помощью графического вычитания реальной ЛАЧХ из желаемой ЛАЧХ.
Рисунок 11 – Реальная, желаемая ЛАЧХ и ЛАЧХ
корректирующего устройства
7 РАСЧЕТ КОРРЕКТИРУЮЩЕГО УСТРОЙСТВА
7.1 Расчет дискретного корректирующего устройства
Одним из методов коррекции стало применение программных корректирующих устройств на МП, применение которых позволяет варьировать параметры в широких пределах и быстро их изменять без изменения технического исполнения системы.
Дискретная коррекция заключается в составлении программы коррекции на том языке, на котором работает микропроцессор.
Для того, чтобы составить программу коррекции необходимо получить характеристическое уравнение в реальном масштабе времени.
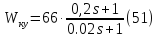
Передаточная функция корректирующего устройства имеет вид:
После замены
 ,
,
 ,
,
передаточная функция корректирующего устройства примет вид:
Представим разностное уравнение в виде:

Программа коррекции для микропроцессора, написанная на языке Assembler:
i_port EQU 11h; номер порта для чтения
o_port EQU 12h; номер порта для записи;
Запишем данные в ячейки памяти начиная с адреса 0000.
DB 0; выделение памяти под переменные xk+1, x, xk-1.
DB 1; выделение памяти под переменные yk+1, y, yk-1.
;вычисляем значение выражения;
у(k)= B2·y1+B1·y+ A2·x1+ A1·x
start: ;метка начала цикла коррекции
in al,i_port; чтение данных из порта (x)
mov x,al
mul al,A1; вычисление слагаемого А1*х
mov bl,al; сохранение результата в bl
; в результате имеем А1*х в регистре bl
mov al,х1;
mul al,A2; слагаемое А2*х1
add bl,al; прибавление к предыдущему результату
;в результате имеем А1*х+А2*х1 в регистре bl
;Повторение аналогичных действий для всех переменных.
; в регистре b1 имеем результат вычисления всего выражения
mov y1,y
mov y,bl
mov x1,x
mov x,bl
out o_port, bl; вывод управляющего сигнала из bl
jmp start; зацикливание на начало программы
Блок-схема программы коррекции представлена на рисунке 12.
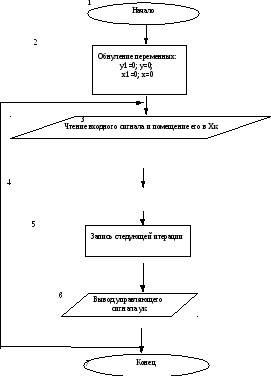
Рисунок 12 – Блок-схема программы коррекции системы автоматического управления инкубатора
Вывод. В данном разделе курсовой работы была разработана программа для дискретной коррекции, применение которой позволяет изменять параметры системы без изменения технического исполнения, что не несет дополнительных расходов.
ЗАКЛЮЧЕНИЕ
При выполнении курсовой работы была рассмотрена система автоматического управления инкубатора. Были определены назначение, состав и основные требования к системе, подобрана элементная база.
В ходе анализа системы был построен переходный процесс и амплитудно-частотные характеристики системы, определены прямые и косвенные показатели качества, а также определение устойчивости системы. По обоим критериям система оказалась устойчива. При построении ЛАЧХ было замечено, что система нуждается в коррекции.
При проведении коррекции был предложен вариант дискретной коррекции в виде программы к микропроцессору. Данный вариант не предусматривает технического изменения системы, и коррекция будет более быстродействующая, хотя и с меньшим качеством из-за накапливания ошибки коррекции (итерационный метод).
Но в данном случае, предпочтительнее аналоговое устройство, поскольку система работает не на высоких частотах и более важным критерием является качество регулирования, а также полученное КУ имеет низкую стоимость.