

2.3 Выбор электронагревательного элемента
Для обогрева инкубатора необходимо выбрать нагревательный элемент. Для этой цели наиболее удобно использовать нагревательные ленты АНТ. Они основаны на заземлённом нагревательном кабеле, сделанным из аморфной металлической ленты, заключённой в механически прочную, но гибкую оболочку.
Габаритные размеры инкубатора – 0,47х0,47х0,2 м. Для обогрева инкубатора площадью 0,2209 м2 необходимо 0,4418 м нагревательной ленты. Округлим значение до 0,45 м.
Технические характеристики нагревательного элемента:
- предел мощности, Вт/м 62;
- напряжение питания, В 220;
- постоянная времени,°C 30;
- верхний предел рабочей температуры, °С 70;
- максимальное значение тока, А 5.
Передаточная функция нагревательного элемента имеет вид:
где Т – постоянная времени прибора.
Рассчитаем коэффициент усиления:

где
 – верхний предел рабочей температуры;
– верхний предел рабочей температуры;
 – входное
напряжение:
– входное
напряжение:

где P – мощность;

Отсюда

Тогда передаточная функция нагревательного элемента будет иметь вид:
2.4 Выбор ёмкости инкубатора

Рисунок 2 – Инкубатор. Внешний вид
Корпус инкубатора (рис.2) изготовлен из стеклопластика, благодаря чему он легок и очень прочен; крышка изготовлена из плексгласа, она легко снимается для доступа к яйцам.
На лицевой стороне крышки расположены:
-
Винт и гайка – барашек регулятора температуры (рис.3).
-
Индикатор, излучающий красный свет, сигнализирующий включение инкубатора в сеть и прогрев нагревательного элемента.
-
Два вентиляционных отверстия, закрытые пробками.
Инкубируемые
яйца размещаются на металлической
сетке, устанавливаемой в корпусе
инкубатора. Режим работы инкубатора –
непрерывный.
Рисунок 3 – Регулятор температуры
Необходимая температура обогрева, °C 37;
Внутренние размеры инкубатора, м 0,47х0,47х0,2;
Объём ёмкости инкубатора вычисляется по формуле:
V=L*B*H=0,47*0,47*0,2=0,04418 м3.
Передаточная функция ёмкости инкубатора имеет вид:
 ,
,
 ,
,
где с – удельная теплоёмкость, с=1,59 кДж/кг*К=1590 Дж/кг*К;
 – плотность воздуха, при t=37°C
-
– плотность воздуха, при t=37°C
-
 =1.128
кг/м3.
=1.128
кг/м3.
Отсюда

 ,
,
где – кратность воздухообмена в инкубаторе,
согласно СНиП 2.08.01-89*, - не менее 10 раз/час,
т.е. 10 раз/3600 с, сократим и получим 1/360.
– кратность воздухообмена в инкубаторе,
согласно СНиП 2.08.01-89*, - не менее 10 раз/час,
т.е. 10 раз/3600 с, сократим и получим 1/360.
Отсюда
Получаем передаточную функцию ёмкости инкубатора:
2.5 Выбор датчика температуры
Для корректной работы системы и поддержания заданной температуры в инкубаторе, необходимо использование датчика температуры.
Так как система работает в нормальных условиях, то измерение большого перепада температур не требуется. На основании этого выбираем датчик температуры ТСМ-6114.
Технические характеристики прибора:
- погрешность прибора, °С ±0,5;
- предел измеряемых температур -50…+100;
- сопротивление датчика, Ом (при t=500) 99,58;
- относительная влажность воздуха, % 30 – 95;
- постоянная времени прибора , с 0,02;
- масса прибора, кг не более 0,3;
- число чувствительных элементов 1;
- напряжение питания, В 24.
Исходя из того, что график работы датчика температуры – линейная характеристика, передаточная функция будет иметь вид:
 ,
,
где Т – постоянная времени прибора.
Рассчитаем коэффициент передачи:
 ,
,
где – необходимая температура обогрева,
равная 37 °С.
– необходимая температура обогрева,
равная 37 °С.
Получаем
 .
.
Тогда передаточная функция датчика температуры будет иметь вид:
3 РАСЧЁТ ДАТЧИКА ОБРАТНОЙ СВЯЗИ
3.1 Датчик температуры
Для поддержания заданной температуры в инкубаторе необходимо измерительное устройство, передающее сигнал микропроцессору. В качестве такого устройства взят датчик температуры ТСМ-6114.
Термометры сопротивления предназначены для измерения температуры в диапазоне от -200°С до +600°С. Они бывают металлические и полупроводниковые. Для изготовления металлических термометров используется медь и платина. Медные термометры работают в диапазоне от 0°С до 200°С. Градуировочная характеристика в этом достаточно узком диапазоне температур линейная
Rтс=R0 (1 + α∙T)
где R0– значение сопротивления при 0°С,
α = 0,486∙10-3 1/град - температурный коэффициент сопротивления или чувствительность термометра сопротивления,
Т – температура в °С.
Конструкции термометров чрезвычайно разнообразны и определяются, главным образом, областью применения. Наиболее часто ТС выполняются в виде бифилярной обмотки тонкого медного или платинового провода на диэлектрическом основании. Бифилярная обмотка необходима для получения безиндуктивного сопротивления. Для защиты от агрессивных сред, используются разнообразные чехлы из нержавеющей стали и других материалов, что увеличивает массу датчика и ухудшает его динамические характеристики.
Градуировочные характеристики платиновых термометров стабильны во времени и мало различаются от экземпляра к экземпляру. Медные термометры уступают платиновым с метрологической точки зрения, но вследствие их сравнительной дешевизны широко применяются, если соответствуют температурному диапазону и требованиям точности.
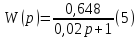
В результате расчета датчика построим статическую характеристику зависимости сопротивления датчика от температуры.
Рисунок 4 – Зависимость сопротивления термометра от температуры
На основании полученных статических характеристик можно сделать вывод о том, что данный датчик подходит для системы.
4 РАСЧЕТ ХАРАКТЕРИСТИК ЛОКАЛЬНОЙ СИСТЕМЫ УПРАВЛЕНИЯ
4.1 Расчёт устойчивости системы
Преобразуем функциональную схему, представленную в соответствии с рисунком 1, в структурную на основе передаточных функций, полученных в пункте 2. Структурная схема локальной системы управления инкубатора представлена на рисунке 5.

Рисунок 5 – Структурная схема системы автоматического управления
инкубатором
Выделим в структурной схеме изменяемую и неизменяемую части системы автоматического управления. К неизменяемой части локальной системы управления относят типовые звенья, параметры которых физически изменить невозможно и передаточная функция которых по отношению к основному сигналу не равняется единице. К изменяемой части относится микропроцессор, так как его передаточная функция зависит от управляющей программы и может меняться.
Найдем общую передаточную функцию замкнутой системы:


Характеристическое уравнение имеет вид:

Проверим систему на устойчивость по критерию Гурвица.
Для того чтобы САУ была устойчива, необходимо и достаточно, чтобы все определители Гурвица были положительны.
Главный определитель Гурвица составляют по следующим правилам:
-
по главной диагонали записывают коэффициенты, начиная с а1 и заканчивая аn,
-
недостающие элементы столбца вверх заполняются коэффициентами с возрастающими индексами, а вниз с уменьшающимися,
-
если номер индекса i>n или i<0, то на месте такого элемента записывается ноль.
На основании выше изложенных правил составим определители Гурвица и вычислим их:
 ;
;



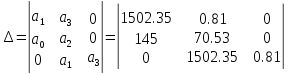


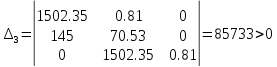
Как видно из расчетов система устойчива, так как определители Гурвица положительны.
4.2 Построение переходного процесса системы
Спроектированная
САР должна быть не только устойчивой,
но и
обладать
определенными показателями качества.
О качестве системы
судят по виду переходного процесса,
возникающего
в системе при отработке единичного
возмущающего воздействия. Чем меньше
перерегулирование
 ,
время переходного tпер,
количество
колебаний и выше точность, тем выше
качество
системы.
,
время переходного tпер,
количество
колебаний и выше точность, тем выше
качество
системы.
Перерегулирование
 определяется
отношением максимального
выброса
хмах-
хуст
регулируемой величины к ее установившемуся
значению хуст
в процентах.
определяется
отношением максимального
выброса
хмах-
хуст
регулируемой величины к ее установившемуся
значению хуст
в процентах.
В реальных системах перерегулирование не превышает 10-50%.
Время переходного процесса tпер характеризует быстроту затухания колебаний и отсчитывается от момента подачи возмущения до момента, когда регулируемая координата станет равной допустимому значению, составляющему 5 % установившегося значения.
Достоинствами способа оценки показателей качества по переходному процессу являются наглядность и точность.
Построим переходный процесс системы, используя функцию step в программе Matlab.
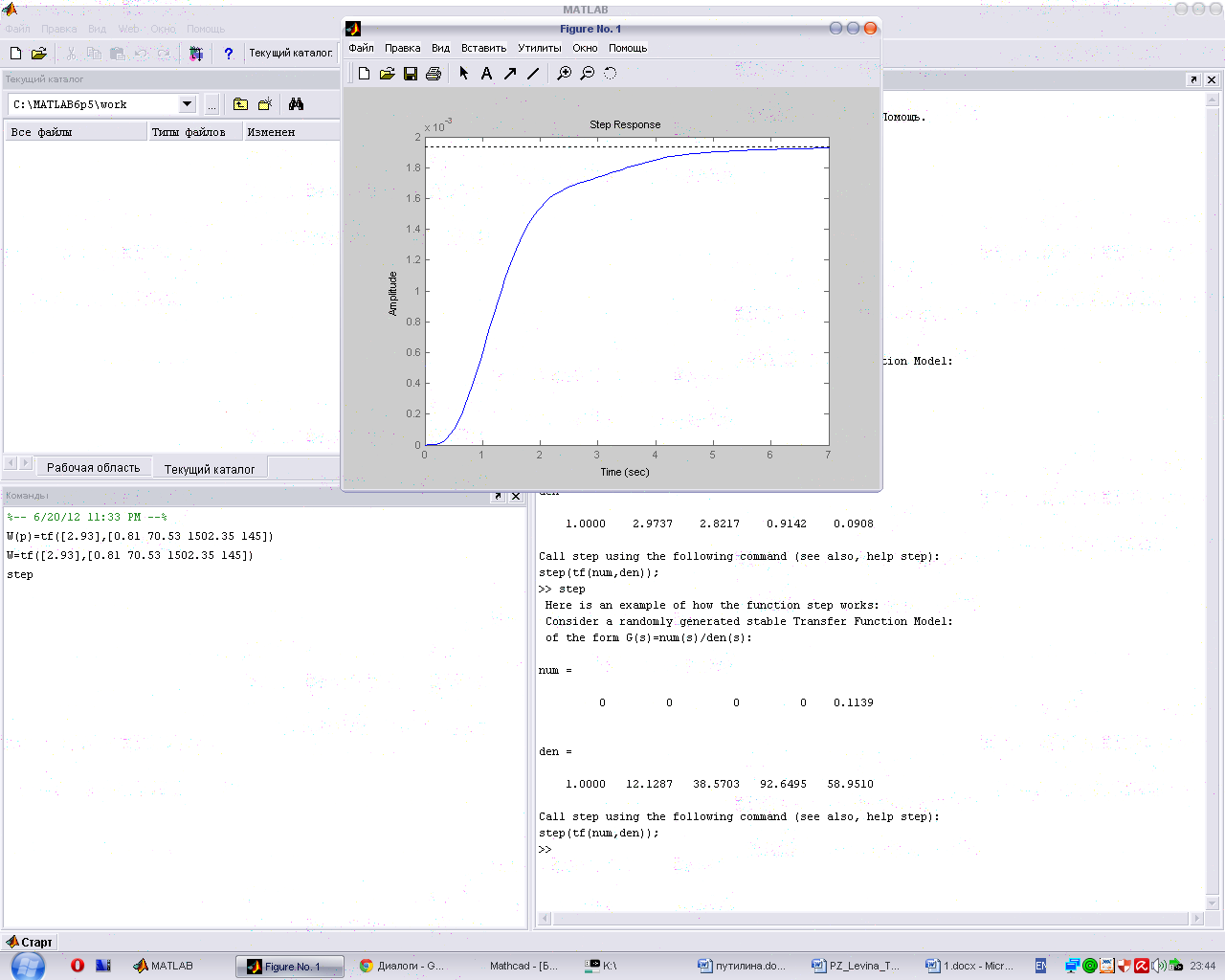
Рисунок 6 – График переходного процесса системы
Показатели качества определяются по графику переходного процесса исходной системы автоматического регулирования:
Перерегулирование или (максимальная динамическая ошибка) – определяется выражением:
где
hmax
– максимальное значение переходного
процесса,
 ;
;
hуст
– установившееся значение переходного
процесса,
 .
.
Для
данной системы перерегулирование равно
![]() 0.
0.
Время нарастания регулируемой величины tнар– время, при котором выходная величина достигает своего максимального значения. tнар =6,2 с.
Время первого согласования tсогл - время, за которое регулируемая величина первый раз достигает своего установившегося значения. tсогл =6,2 с.