


Введение
В последнее время при автоматизации производственных процессов все более широкое распространение получают различные системы автоматического управления.
Системами автоматического поливания газонов (САПГ) могут быть названы такие устройства, которые способны автоматически отмеривать и производить выдачу заданного количества воды на определенную площадь.
Применение САПГ на производстве позволяют повысить эффективность ведения технологических процессов; сократить количество обслуживающего персонала на том или ином объекте; повысить производительность автоматизированных устройств и объектов и повысить их экономичность.
В зависимости от требований производства поливание газонов может быть порционным (дискретным) и непрерывным и осуществляется объемным или весовым методом. Порционные САПГ применяются на предприятиях выращивания цветов, овощей и прочего. САПГ непрерывного действия применяются для обеспечения стабильной подачи воды, в основном в непрерывных производственных процессах.
Таким образом, целью данной курсовой работы является проектирование системы автоматического управления поливальной машины, которая будет обеспечивать рациональное увлажнение почвы.
1 Техническое задание
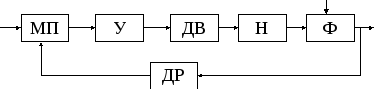
Необходимо разработать систему автоматического управления, позволяющая осуществлять автоматическое поливание газонов. Структурная схема данной системы приведена на рисунке 1.
 ветер
ветер
Рисунок 1 – Структурная схема САУ поливальной машины
МП – микропроцессор;
У – усилитель;
ДВ – двигатель;
Н – насос;
Ф – форсунка;
ДР – датчик расхода.
МП – микропроцессор со специализированным программным обеспечением, осуществляет циклический опрос датчика расхода с периодом не менее 5 минут и анализирет его показания;
У – усилитель, предназначен для усиление сигнала, подаваемого с микропроцессора на двигатель;
ДВ – двигатель, передает напор воды в насос.
Н – насос, перекачивает воду на форсунку.
Ф – форсунка, распыляет воду на заданную площадь (45 х 90 метров).
ДР – датчик расхода, который предназначен для измерения расхода воды на заданную площадь.
Работа системы осуществляется следующим образом.
Сигнал с микропроцессора поступает на усилитель, на котором этот сигнал усиливается для его приема двигателем. Начинает свою работу двигатель, который, в свою очередь, вращает насос. Напор воды поступает на форсунку, фунцией которой является распыление воды на заданную площадь. С форсунки сигнал о расходе воды поступает на датчик расхода, который фиксирует это значение. Таким образом, на микропроцессор поступают сведения о расходе воды на данный момент времени.Последний анализирует это значение и вырабатывает управляющий сигнал, о том достаточно почва увлажнена или требуется еще некий объем воды. В результате получаем САУ поливальной машины.
Параметры регулируемой системы:
-
Мощность двигателя – 500 Вт;
-
Производительность насоса – 2 куба/час;
-
Максимальный интервал обновления данных (период дискретности) T0 = 5 мин.
-
Время регулирования tp 3000 c;
-
Колебательность n 2;
-
Перерегулирование 3 %;
-
Максимально допустимое отклонение регулируемой величины в установившемся режиме 1%;
2 ОПРЕДЕЛЕНИЕ ЭЛЕМЕНТНОЙ БАЗЫ И РАСЧЕТ
ПЕРЕДАТОЧНЫХ ФУНКЦИЙ ВЫБРАННЫХ ЭЛЕМЕНТОВ
2.1 Выбор форсунки
Существует огромный выбор различных типов форсунок. Расмотрев некоторые из них подбираем форсунку типа КБ 861, так как она удовлетворяет требованиям системы по техническим характеристикам.
Технические характеристики:
-
Прием воды:Q=2м3/час;
-
Дальность распыления:l=10м;
-
Допустимое отклонение температуры окр.среды:Δt= +25+_5˚С;
-
К.П.Д. форсунки:η=65%.
Вывод передаточной функции:
![]() ,
где
,
где
U(t)-вход, а x(t)-выход. Переходя к операторной форме получим:
![]() ,
,
где kф = 2 - коэффициэнт передачи аппериодического звена,
Тф = 3.1 – постоянная времени аппериодического звена.
![]()
2.2 Выбор насоса
Известно большое колличество типов насосов. В данную систему автоматического управления (САУ поливальной машины) мы выбираем наиболее оптимальный по техническим характеристикам и доступный по цене центробежный насос типа 1 ½ К – 6.
Технические характеристики:
-
Подача Q=2м3/час;
-
Подача Q=0.5л/сек;
-
Полный напор Qп= 6.76 Н в м;
-
Число оборотов в минуту n=2900;
-
Мощность N=500 Вт;
-
К.П.Д. насоса η=44%;
-
Допустимая вакуумметрическая высота всасывания Ндопвак=6.6 м;
-
Диаметр рабочего колеса D=128 мм.
Вывод передаточной функции:
![]() ,
где
,
где
U(t)-вход, а x(t)-выход. Переходя к операторной форме получим:
![]() ,
,
где kн = 5 - коэффициэнт передачи аппериодического звена,
Тн = 1.8 – постоянная времени аппериодического звена.
![]()
2.3 Выбор датчика расхода
В настоящее время существует огромное колличество датчиков расхода. В данном случае наиболее оптимальным является датчик расхода воды типа ДМЕК, который удовлетворяет требованиям к системе.
Технические характеристики:
-
Основная допустимая погрешность +_1% от диапазона измерения.
-
Дополнительная погрешность при отклонении температуры окр.среды от нормальной +20 +_5˚С на каждые 10˚С не превышает +_0.25% от диапазона измерения;
-
Порог чувствительности не более 0.1% от максимального значения входного сигнала. Вариация +_0.5% от диапазона измерения;
-
Выдерживает одностороннюю перегрузку полным рабочим давлением;
-
Максимальный расход Qmax= 2м3/час.
Вывод передаточной функции:
W(p)=kД – пропорциональное звено.
Выходное напряжение:
![]() ,
,
где R – сопротивление всей обмотки,
r – дополнительное сопротивление.
Так как
![]() ,то
,то
![]() и
и
![]()
kД=![]()
2.4 Выбор двигателя
Существует огромный выбор различных типов двигателей. Расмотрев некоторые из предложенных в литературе подбираем двигатель типа 4А225М4, так как он удовлетворяет требованиям системы по техническим характеристикам.
Технические характеристики:
-
Синхронная частота вращения n=2900 об/мин;
-
Мощность N=500 Вт;
-
К.П.Д. двигателя η=87.5%;
-
Сопротивление R=116 Ом;
-
Напряжение Uн=220В.
Передаточная функция:
![]() -
аппериодическое звено второго порядка,
-
аппериодическое звено второго порядка,
где kдв=2.5 – передаточный коэффициэнт двигателя;
Т = 2.7 – постоянная времени звена;
ξ=0.53.
![]()
2.5 Выбор усилителя
Известно большое колличество различных усилителей. В данную систему автоматического управления (САУ поливальной машины) мы выбираем наиболее оптимальный по техническим характеристикам и доступный по цене операционный усилитель типа 1322.
Технические характеристики:
-
Тип корпуса О.У.:Т099;
-
Минимальное напряжение питания Umin=+_5 В;
-
Максимальное напряжение питания Umах=+_50 В;
-
Мощность потребления в режиме покоя Nпок=240 мВт;
-
Коэффициэнт усиления при разомкнутой обр.связи k= 20;
-
Ширина пропускания при разомкнутой обр.связи: 20 МГц;
-
Скорость нарастания входного напряжения: 100 В/мс.
Передаточная функция:
![]()
![]()
2.6 Выбор микропроцессора
В настоящее время стали широко применяться микропроцессорные комплекты (МПК) серий К580, К583, К588. При выборе МПК следует руководствоваться следующими параметрами:высокая производительность МП, достаточный объем ОЗУ и ПЗУ; возможность цифровой обработки аналоговых сигналов в реальном масштабе времени; возможность программной коррекции; малое энергопотребление; совместимость с другими микросхемами; доступность элементов; мощная и гибкая система команд МП; наличие встроенных ЦАП и АЦП. На основании этих критериев выбираем МП серии К583 ИК1.
Технические характеристики:
-
Разрядность Бит:
-
Адреса – 16;
-
Микрокоманд – 8;
-
Шины команд – 16;
-
Регистра состояний – 1.
Один числовой вход условий;
Наличие прерываний;
Тактовая частота F = 1МГц;
Ток потребления Iп=300 мА;
Напряжение питания Uп=+_20+_60 В;
Выходное напряжения Uвых=12 В.
Передаточная функция:
![]()
Ниже приведена классификация датчиков расхода (рисунок 2)

По принципу действия
Рисунок 2 – Классификация датчиков расхода