

Курсовые работы / Поливалка для газонов / Плакаты
.docФУНКЦИОНАЛЬНАЯ СХЕМА ПОЛИВАЛЬНОЙ МАШИНЫ
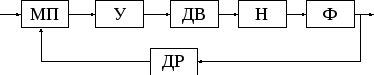
МП – микропроцессор;
У – усилитель;
ДВ – двигатель;
Н – насос;
Ф – форсунка;
ДР – датчик расхода.
Параметры регулируемой системы:
-
Мощность двигателя – 500 Вт;
-
Производительность насоса – 2 куба/час;
-
Максимальный интервал обновления данных (период дискретности) T0 = 5 мин.
-
Время регулирования tp 3000 c;
-
Колебательность n 2;
-
Перерегулирование 3 %;
-
Максимально допустимое отклонение регулируемой величины в установившемся режиме 1%;
КЛАССИФИКАЦИЯ ДАТЧИКОВ РАСХОДА
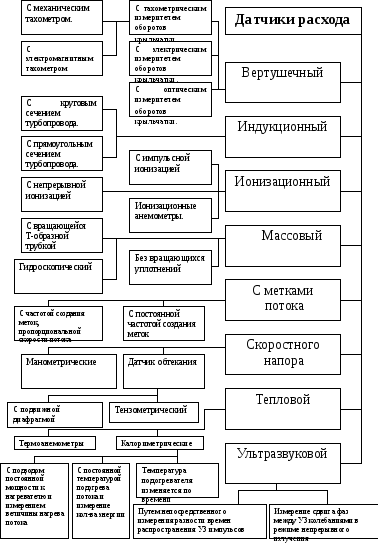
По принципу действия
РАСЧЕТ ТАХОМЕТРИЧЕСКОГО ДАТЧИКА РАСХОДА
![]() ,
,
где а1 = 28, а2 = 1, Q = 0.6, ω = 1.37.
Момент сопротивления сил вязкого трения рассчитывается по формуле:
![]() ,
,
где а3 = 4, а4 = 2.
Момент сопротивления сил трения в подшипниках рассчитывается по формуле:
![]() ,
,
где а5 = 3, а6 = 2.
Момент сопротивления реакции тахометрического преобразователя рассчитывается по формуле:
![]() ,
,
где а7 = 1.
Так как сумма всех моментов сопротивления (МВ + МТ + МЭ) равна движущему моменту МД , то следовательно:
![]()
откуда
![]() ,
,
где
![]()

![]()
Д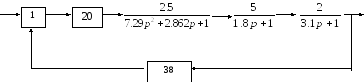 ЕЛЕНИЕ
ЛСУ НА ИЗМЕНЯЕМУЮ И НЕИЗМЕНЯЕМУЮ ЧАСТИ.
ЕЛЕНИЕ
ЛСУ НА ИЗМЕНЯЕМУЮ И НЕИЗМЕНЯЕМУЮ ЧАСТИ.
![]()

![]()
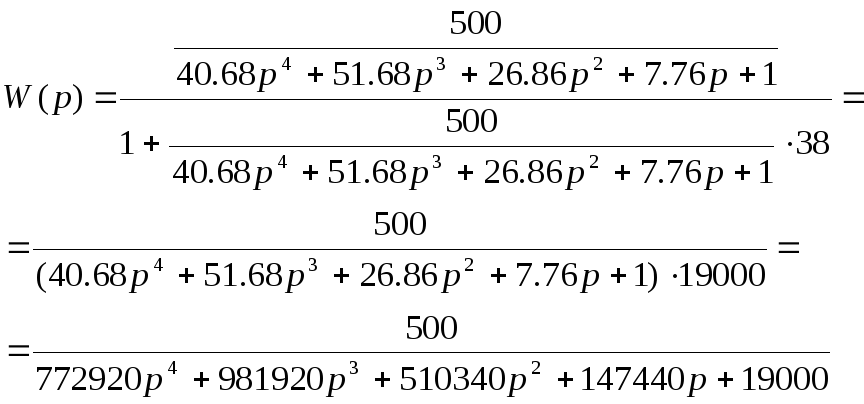
ПРОВЕРКА УСТОЙЧИВОСТИ ЛИНЕЙНОЙ ЧАСТИ СИСТЕМЫ ПО КРИТЕРИЮ ГУРВИЦА
Запишем характеристическое уравнение системы:
![]()
a0=772920; a1=981920; a2=510340; a3=147440; a4=19000.
Δ=


-
Δ1=
2.
Δ2=![]()

![]()
3.
Δ3=
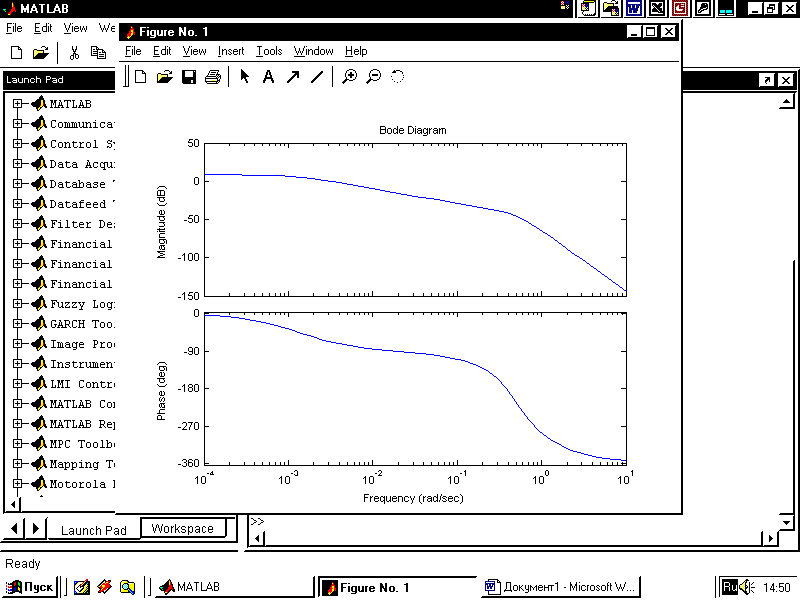
ЛОГАРИФМИЧЕСКИЕ ХАРАКТЕРИСТИКИ ПОЛИВАЛЬНОЙ МАШИНЫ

 40
Дб/дек
40
Дб/дек
0


Р Т
- 20 Дб/дек
Т
- 20 Дб/дек
 0
0




20 Дб/дек

 0
0
 - 40 Дб/дек
- 40 Дб/дек


СИНТЕЗ ПАРАЛЛЕЛЬНОГО КОРРЕКТИРУЮЩЕГО УСТРОЙСТВА
По виду ЛАЧХ КУ по справочнику находим КУ.
Схема параллельного корректирующего устройства
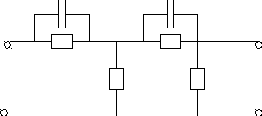 С2
С1
С2
С1
R4 R3
U1 R2 R1 U2
 ,
,
где
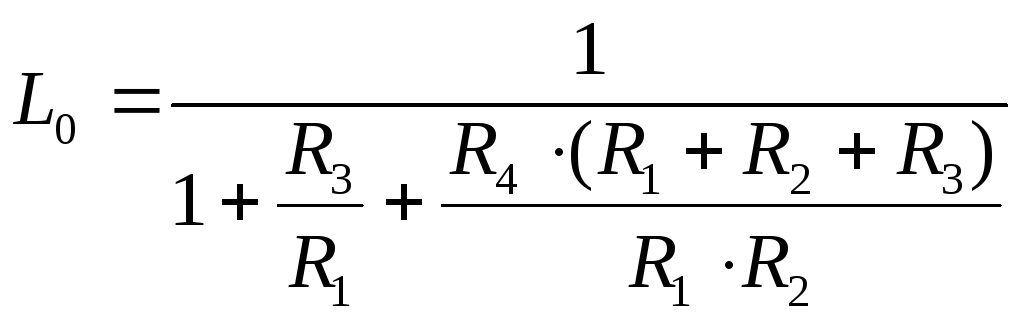
В результате вычислений получим, что коэффициент усиления:
![]()
Параллельное включение корректирующего устройства

БЛОК – СХЕМА ПРОГРАММЫ КОРРЕКЦИИ
