

6 Построение лачх и лфчх системы и их анализ
Для построения ЛАЧХ и ЛФЧХ разомкнем систему. Структурная схема разомкнутой САУ представлена на рисунке 7.

Рисунок 7 - Структурная схема разомкнутой системы
Найдем передаточную функцию разомкнутой линейной системы:
![]() ,
(42)
,
(42)
где
![]() – передаточная функция
ветротурбины;
– передаточная функция
ветротурбины;
![]() – передаточная функция
генератора;
– передаточная функция
генератора;
![]() – передаточная функция
аккумулятора;
– передаточная функция
аккумулятора;
![]() – передаточная функция
датчика напряжения.
– передаточная функция
датчика напряжения.
Передаточная функция разомкнутой системы:
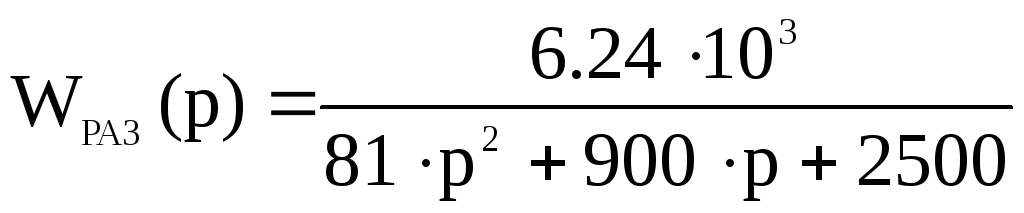 (43)
(43)
Создадим LTI-объект в среде Matlab:
w=tf([0 6240],[81 900 2500 0])
Transfer function:
6240
-------------------------
81 s^3 + 900 s^2 + 2500 s
Проведем z-преобразование полученной передаточной функции:
z=c2d(w,0.01)
Transfer function:
1.611 z^2 + 0.8599 z + 0.006226
-----------------------------------------
z^3 - 1.008 z^2 + 0.007747 z - 1.495
Sampling time: 0.01
Таким образом, получили передаточную функцию разомкнутой системы в форме z-преобразования:
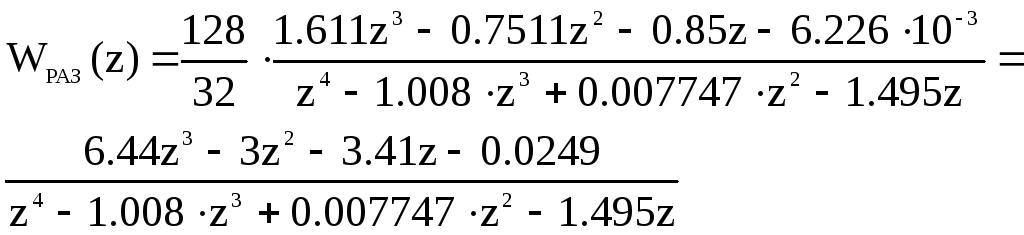 (44)
(44)
![]() Перейдем
к псевдочастоте, сделав следующую
подстановку:
Перейдем
к псевдочастоте, сделав следующую
подстановку:
![]() ,
(45)
,
(45)
где
![]()
Тогда, получим передаточную функцию дискретной разомкнутой системы:

Для построения ЛАЧХ и ЛФЧХ воспользуемся программой Matlab:
w=tf([-3.06*10^7 -6.60*10^6 1.02*10^6 -2.97*10^4 -0.510],[-1.78 1.01*10^6 1.35*10^5 -7.50*10^3 149])
Transfer function:
3.06e007 s^4 + 6.6e006 s^3 - 1.02e006 s^2 + 2.97e004 s + 0.51
-------------------------------------------------------------
1.78 s^4 - 1.01e006 s^3 - 135000 s^2 + 7500 s – 149
Применим команду margin(w), grid. Графики ЛАЧХ и ЛФЧХ представлены на рисунке 8.
λ, рад/с →
φ, °
↓
↑
20lg(A),
дБ/дек


Рисунок 8 – ЛАЧХ и ЛФЧХ разомкнутой системы
Из графика запас устойчивости по фазе равен 90.60=39.7 рад/сек. Так как ФЧХ не пересекает прямую –π, то запас устойчивости по амплитуде неограничен.
7 Построение жлачх системы
Построим ЖЛАЧХ методом запретной зоны. Для построения ЖЛАЧХ необходимо найти запретную зону, ниже которой ЖЛАЧХ не может опускаться.
Исходными данными для построения служат параметры из технического задания. Перерегулирование системы составляет 30%. Время регулирования равно 0,27 с. Колебательность принимает значение 1,27. Максимально допустимая ошибка составляет 0,05.
Зададим скорость изменения входной величины:
g'=0,2 (м/с);
Зададим ускорение изменения входной величины:
g''=0,04 (м/с2).
Численное значение частоты рабочей точки определяется по формуле:
![]() (с-1)
(с-1)
Вычисляем амплитуду рабочей точки:

Получили точку А=(0,2; 26).
Через полученную точку проводим прямую с наклоном –20 дБ/дек таким образом, чтобы она пересекала обе оси. Все, что лежит ниже получившейся прямой будет запретной зоной.
По номограмме Солодовникова определяем требуемое значение вещественной частотной функции Рmax, а по этому значению и кривой tр находим время регулирования:
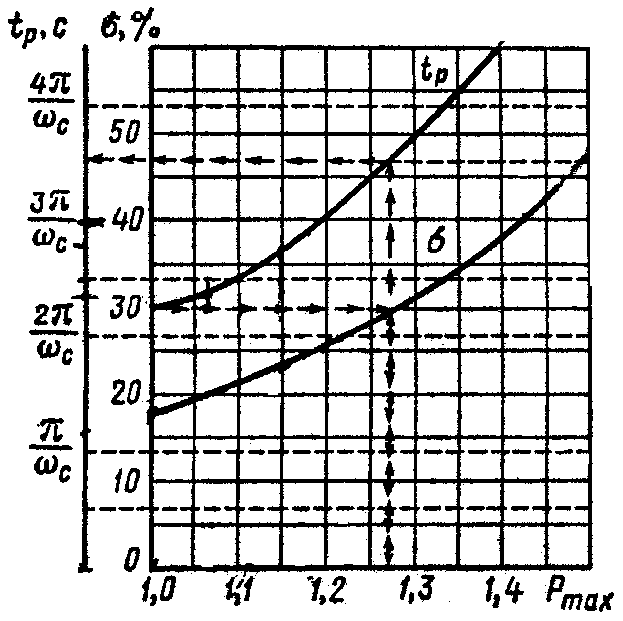
Рисунок 10 - Номограмма Солодовникова для определения σ и tр
Так как σ=30%, то по номограмме Солодовникова определяем Рmax(ω)=1,27, а время регулирования определяется по формуле:
![]() (46)
(46)
По графику определяем, что время регулирования равно:
![]() (47)
(47)
Время регулирования равно 0,27 с. Находим частоту среза:

Найденное значение λ ср наносим на шкалу частот.
Через полученную точку проводим асимптоту желаемой ЛАЧХ с наклоном –20дБ/дек. Проведем две параллельные прямые, которые будут ограничивать асимптоту с наклоном –20 дБ/дек. Величина этих прямых определяется по формуле:
![]() (48)
(48)
где М=1,27 – колебательность.
Тогда рассчитаем эти величины:
 (49)
(49)
 (50)
(50)
Желаемая ЛАЧХ системы изображена на рисунке 9.
-20дБ/дек
А(0.2;26)
ЖЛАЧХ
λср =40
λ, с-1 →
↑
20lg(A),
дБ/дек







Рисунок 9 - Желаемая ЛАЧХ системы
Из графика видно, что желаемая ЛАЧХ совпала с реальной ЛАЧХ системы, таким образом, можно сделать вывод, что система не нуждается в коррекции, все элементы и их характеристики подобраны верно. Система устойчивая и полностью отвечает техническому заданию.
ЗАКЛЮЧЕНИЕ
В ходе курсового проектирования разработана система автоматического управления ветроэлектростанцией, которая работает на базе микропроцессорного управления.
Производился выбор элементной базы для системы, в ходе которого для каждого элемента подобрали передаточную функцию и технические параметры. Также в систему включили датчик для контроля регулируемой величины.
Рассчитали линейную и дискретную систему на устойчивость, построили графики переходных процессов без микропроцессора и с ним.
При построении ЛАЧХ и ЛФЧХ определили запасы по амплитуде и по фазе. Построение желаемой ЛАЧХ показало, что система не нуждается в корректировке.
Таким образом, после продолжительного проектирования была получена дискретная система автоматического управления, удовлетворяющая требования, поставленным в техническом задании.
СПИСОК ИСПОЛЬЗУЕМЫХ ИСТОЧНИКОВ
-
Биссекерский В. А., Попов Е. П., Теория систем автоматического регулирования / В. А. Биссекерский - М.: Наука, 1996. - 992с.
-
Датчики и приборы измерительные // www.riftek.com
-
Компания ЛМВ ветроэнергетика // www.uintei.na
-
Компания Эста // www.esta.ru
-
Топчеев Ю. И. Атлас для проектирования систем автоматического регулирования / Ю. И. Топчеев – М.: Энергоиздат, 1988 г.
-
Турбина HAWT // www. yuzhmash.com
-
Турбина USW56-100 // www. ovis.khv.ru
-
Юревич Е.И., Теория автоматического управления / Е. И. Юревич - М.: Энергия, 1969. – 640с.