

4.1 Построение лачx
Разомкнутая система образована двумя, соединенными последовательно, апериодическими звеньями, для которых частоты среза будут:
ω1=1/T1=14 рад/c.
По выражению (9) построим ЛАЧХ и ЛФЧХ – рисунок 3, разомкнутой системы,
а по выражению (10) построим переходный процесс в замкнутой системе - рисунок 4:
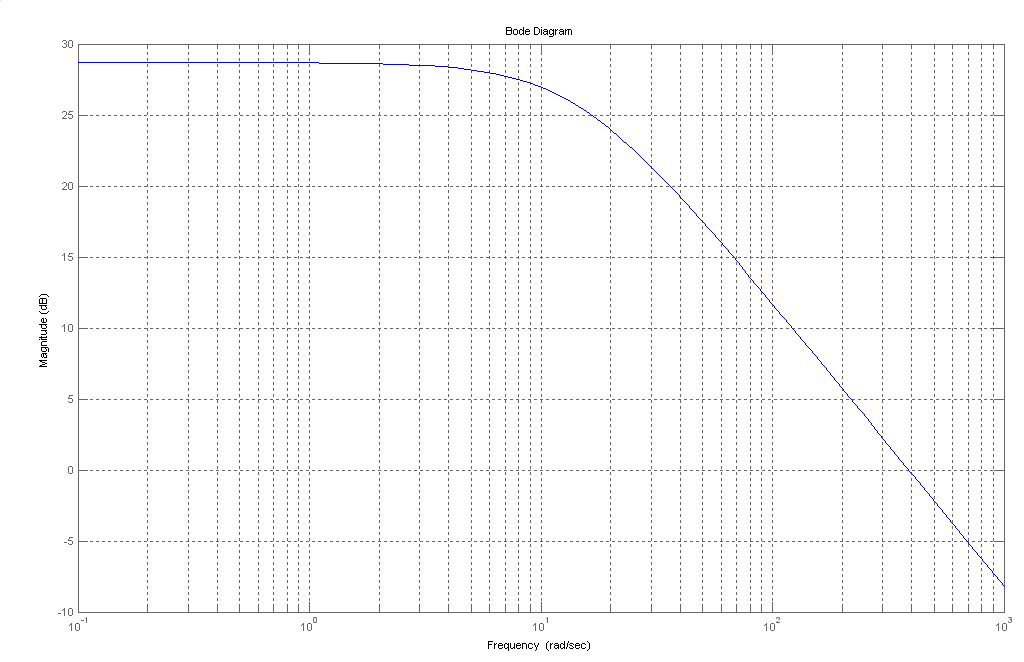
Рисунок 3 – ЛАЧХ и ЛФЧХ разомкнутой системы.
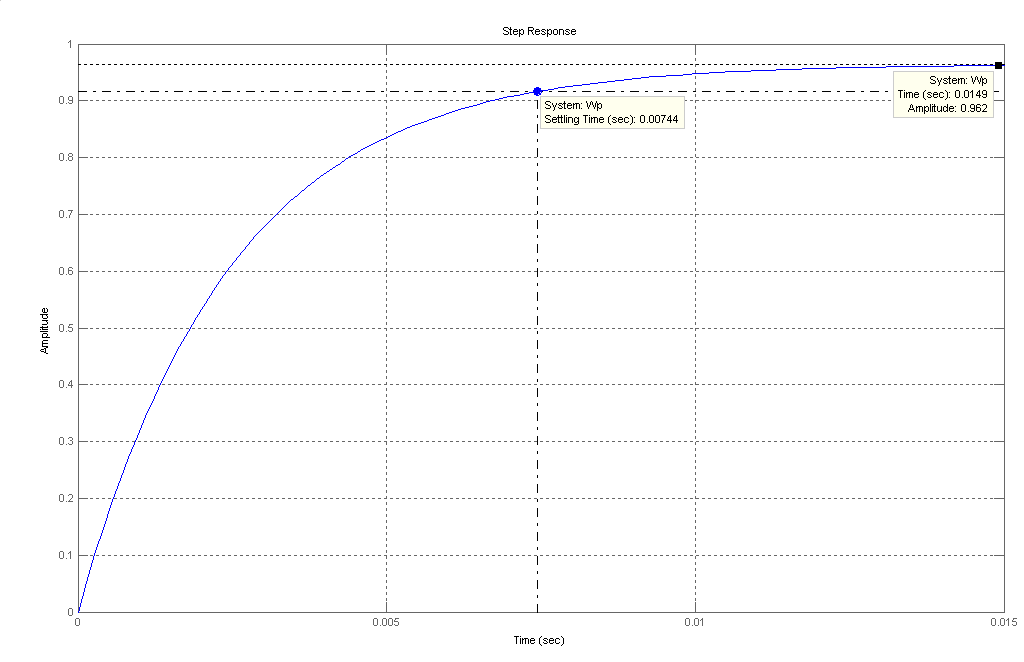
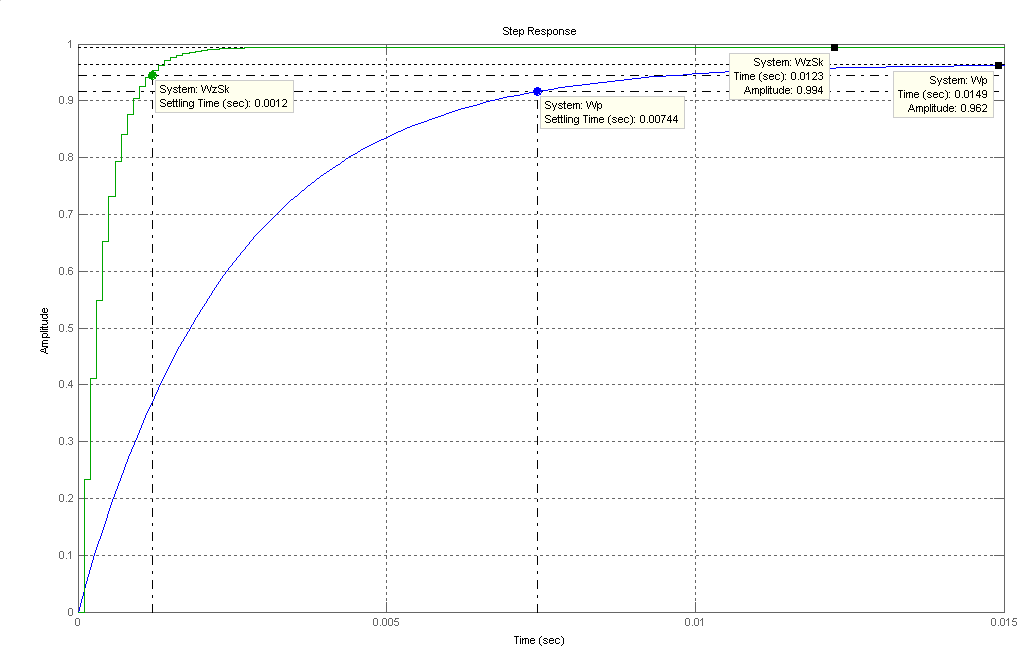
Рисунок 4 – переходный процесс в замкнутой системе.
Прямые оценки качества переходной характеристики:
1. Время регулирования tp=0.00744 c
2. Перерегулирование σ=(0.962-0.962)/0.962=0 %
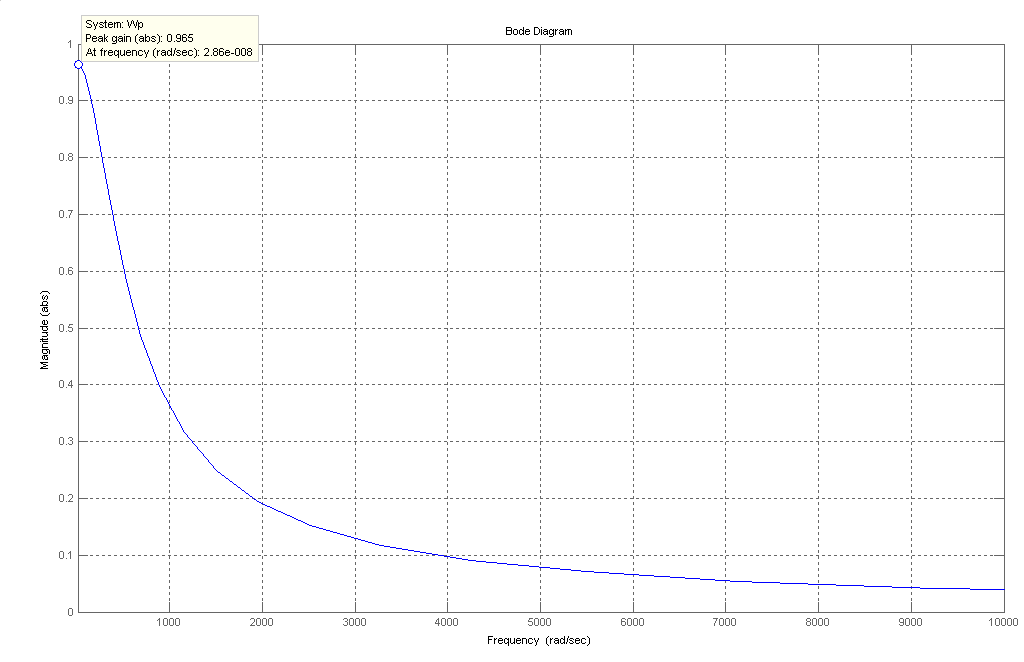
Можно сделать вывод, что система является устойчивой с неограниченно большими запасами по амплитуде и фазе, и характеристики переходного процесса системы удовлетворяют заданным, но требуется проверить систему с учетом ограничений, накладываемых процессором на скорость и ускорение обработки информации.
АЧХ системы выглядит следующим образом:
4.2 Построение ЖЛАЧХ
Проведем построение ЖЛАЧХ методом запретной зоны
Желаемой называют асимптотическую ЛАЧХ разомкнутой системы, имеющей желаемые (требуемые) статические и динамические свойства. ЖЛАЧХ состоит из трех основных асимптот: низкочастотной, среднечастотной и высокочастотной. Среднечастотная асимптота ЛАЧХ разомкнутой системы и ее сопряжение с низкочастотной определяют динамические свойства системы – устойчивость и показатели качества переходной характеристики.
Перейдем к дискретной системе с периодом дискретизации T=0.0001 c
0.0388
----------
z - 0.9986
![]() (33)
(33)
ЛАЧХ
дискретной модели строится в зависимости
от псевдочастоты λ, при этом сначала
п![]() роводится
ω-преобразование заменяя z=(1+ω)/(1-ω), а
затем осуществляется
переход от W(ω) к частотному выражению
передаточной функции через псевдочастоту
λ путем замены ω=0.5Tλj.
роводится
ω-преобразование заменяя z=(1+ω)/(1-ω), а
затем осуществляется
переход от W(ω) к частотному выражению
передаточной функции через псевдочастоту
λ путем замены ω=0.5Tλj.
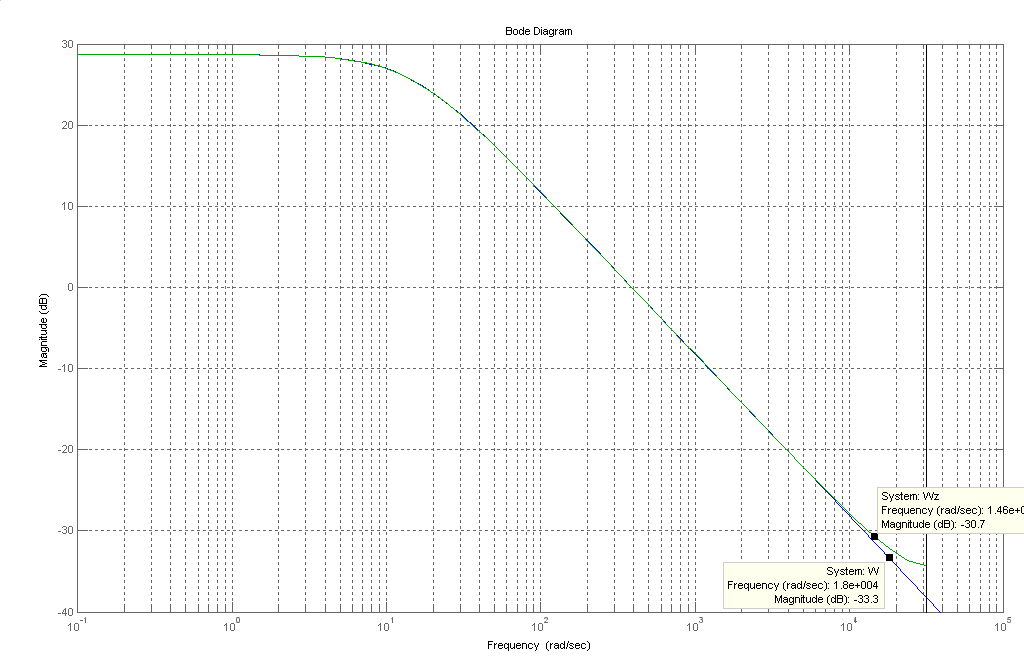
Рисунок 8 – ЛАЧХ непрерывной и дискретной
систем
Замкнутая система в дискретном виде:
0.0388 z - 0.03875
----------------------
z^2 - 1.958 z + 0.9584
![]()
![]() (34)
(34)
Зададим скорость g’= 27 и ускорение обработки g’’=120 информации, а также показатель колебательности M=1.2, max погрешность регулирования =0,3 (Amax=0.965)
Определяем рабочую точку:
=g’’/g’=120/27=4.44 рад/с - псевдочастота
A= Amax/=0.965/0.3=3.25
![]() Дб
Дб
тогда координаты рабочей точки (4.44 рад/с, 10.2 дБ)
Амплитуда на сопрягающих частотах
L1=![]() (35)
(35)
L2=![]() (36)
(36)
Вид запретной зоны показан на рис. 9:

Рисунок 9 –Вид запретной зоны
Так как, ЛАЧХ находится в запретной зоне, то требуется скорректировать систему, изменив коэффициент усиления.
Построим ЖЛАЧХ и определим необходимый коэффициент усиления.
![]()
Таким образом, для осуществления коррекции необходимо ввести корректирующее звено в виде усилителя (умножителя), c коэффициентом усиления 6.
Переходный процесс в исходной и скорректированной замкнутой системе:
Прямые оценки качества переходной характеристики:
1. Время регулирования tp=0.001 c;
2. Перерегулирование σ=0 %.
Данные показатели качества удовлетворяют заданным требованиям.