

2.4 Выбор и расчет передаточной функции объекта управления
Объектом управления коленного сустава робота является шарнирное соединение, применяемое для связи элементов механизма, подвижных относительно друг друга, в режиме скольжения.
В данной системе применены радиально-упорные шарниры, имеющие кольца, сферическая поверхность которых выполнена под некоторым углом к оси шарнира. Это позволяет шарнирным соединениям воспринимать комбинированные нагрузки . Каждый шарнир предназначен для применения при действии нагрузки только в одном направлении. Радиальные нагрузки порождают в шарнире осевую силу, которую необходимо компенсировать силой той же величины, но действующей в противоположном направлении. Поэтому такой шарнир устанавливается напротив второго шарнира. Если два шарнира установлены таким образом, что центр их сферы совпадает, получается шарнир способный выдерживать повышенные радиальные и осевые нагрузки, действующие в двух направлениях.
Радиально-упорные шарниры в данной системе автоматического управления изготовлены в комбинации поверхностей скольжения сталь/композит PTFE. Кольца радиально-упорных шарниров изготовлены из закаленной хромированной стали и отшлифованы. Покрытие поверхности скольжения из композита PTFE нанесено метод инжекции на внутреннюю поверхность внешнего кольца. Поверхность скольжения внутреннего кольца шарнирного соединения выполнена из твердого хрома и покрывается литиевой смазкой.
В данной системе автоматического управления коленным суставом робота используется самосмазывающийся шарнир, не нуждающийся в периодическом техническом обслуживании, так как поверхности скольжения этих шарниров имеют специальные покрытия из современных материалов, обладающие низким сопротивлением трению.
Область допустимых рабочих температур этих шарниров лежит в диапазоне от -400С до +750С, но в течение ограниченного времени они могут работать при температуре до 1100С. Однако, в этих случаях, при достижении температуры 500С нагрузка на шарнирные соединения должна быть снижена.
Передаточная функция объекта управления:

где
 - коэффициент передачи, показывающий
зависимость максимального отклонения
объекта управления от максимального
хода штока.
- коэффициент передачи, показывающий
зависимость максимального отклонения
объекта управления от максимального
хода штока.
где А – максимальный угол отклонения ноги робота;
В – максимальное перемещение штока гидроцилиндра.
Следовательно, передаточная функция имеет вид:

2.5 Выбор и расчет магнитожидкостного вихревого регулирующего элемента
Конструкция элемента состоит из магнитожидкостного сенсора, выполненого из цилиндрического обтекателя, прикрепленного к верхней катушке устройства и заполненного магнитной жидкостью, контактная сторона которого изолирована от рабочего потока упругой резиновой мембраной, а также вихревой камеры, выполненной в корпусе из органического стекла, выходного штуцера, являющегося частью магнитопровода вместе с корпусом устройства, выполненного из литой стали и управляющей катушки.

Рисунок 3 – Конструкция магнитожидкостного вихревого регулирующего элемента
Потоки питания 2 и управления 1 подаются через верхнюю крышку устройства с помощью штуцеров, изготовленных из латуни для исключения ассиметрии магнитного поля внутри камеры. Корпус камеры является сменным с возможностью изменения геометрии прочностной части.
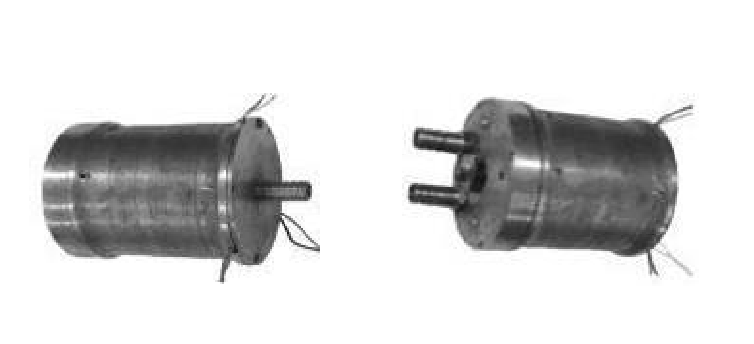
Рисунок 4 – Внешний вид магнитожидкосного вихревого регулирующего элемента
Магнитожидкостному вихревому регулирующему элементу соответствует следующая передаточная функция:

Где Тгр – коэффициент передачи гидравлического регулятора;

Кгр – постоянная времени гидравлического регулятора;

Для вычисления передаточной функции в числовом виде зададимся некоторыми параметрами:
ξ = 2
k =10 -4
x0 = 10-2 м
l = 0,1 м
р0 = 2·107 Па
Подставляя все числовые значения:


Получаем следующее выражение для передаточной функции:

3 РАСЧЕТ ДАТЧИКА ОБРАТНОЙ СВЯЗИ
Магнитожидкостный датчик угла предназначен для измерения пространственных углов относительно линии горизонта. В качестве чувствительного элемента в датчике используется постоянный магнит, взвешенный в магнитной жидкости.
Постоянный магнит – изделие различной формы из магнитотвердого материала с высокой остаточной магнитной индукцией, сохраняющий состояние намагниченности в течение длительного времени. Постоянный магнит применяется в качестве автономных источников магнитного поля.
Свойства магнита определяются характеристиками размагничивающего участка петли магнитного гистерезиса материала магнита: чем выше остаточная индукция Вr и коэрцитивная сила Нс, тем выше намагниченность и стабильность магнита.
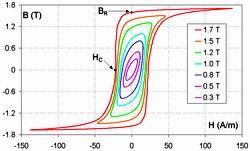
Вr – остаточная индукция; Нс – коэрцитивная сила
Рисунок 3 – Семейство петель магнитного гистерезиса (внешняя петля соответствует состоянию насыщения)
Для производства постоянных магнитов обычно используются следующие материалы: бариевые и стронциевые магнитотвердые ферриты, магниты NdFeB (неодим-железо-бор), редкоземельные магниты SmCo (самарий-кобальт), магниты ALNICO.
В таблице 1 представлены характеристики магнитных материалов.
Таблица 1 – Основные характеристики магнитных материалов
|
Материал |
(ВН)max, МГс*Э |
Вr, Гс |
Нс, Э |
Цена, $ за 1 кг на российском рынке |
Цена, $ на единицу (ВН)max |
|
Гибкие магнитные материалы |
1,6 |
1725 |
1325 |
5÷10 |
3,1÷6,2 |
|
Керамика (феррит) |
3 |
4000 |
2400 |
1÷2,5 |
0,3÷0,85 |
|
ALNICO |
9 |
13500 |
1400 |
44,1 |
4,3 |
|
SmCo |
20 |
10500 |
9200 |
250÷500 |
12,5 |
|
NdFeB |
50 |
14200 |
12500 |
70÷150 |
1,4÷3,7 |
Согласно таблице 1 для системы автоматического управления коленным суставом робота выбирается постоянный магнит ALNICO, удовлетворяющий по своим характеристикам всем заданным параметрам системы.
Магниты ALNICO изготавливаются методом порошковой металлургии из композиционного сплава SmCo5/Sm2Co17 и характеризуются высокими магнитными свойствами, отличной коррозионной устойчивостью и хорошей стабильностью параметров при температурах до 3500С, что обеспечивает им преимущества на высоких температурах перед магнитами NdFeB.

r – радиус, В – индуктивность, l – длина магнита, d – расстояние от поверхности магнита
Рисунок 6 – Цилиндрический магнит
Расчет магнитной индукции аксиально-намагниченных цилиндрических магнитов с радиусом (r) и длиной (l ), в точке расположенной на расстоянии (d) от поверхности, вдоль оси производится по формуле:

где r=17 мм,
d=10 мм,
l=55 мм.

4 РАСЧЕТ УСТОЙЧИВОСТИ СИСТЕМЫ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ КОЛЕННЫМ СУСТАВОМ РОБОТА
4.1 Расчет общей передаточной функции системы и проверка системы автоматического управления коленным суставом робота на устойчивость
Для определения непрерывной части передаточной функции системы необходимо провести преобразование структурной схемы системы без микропроцессора.
МП
ОУ
МЖЦ



МВРЭ




ДУ
МП – микропроцессор, МЖЦ – магнитожидкостный цилиндр, МВРЭ – магнитожидкостный регулирующий вихревой элемент, ОУ – объект управления, ДУ – магнитожидкостный датчик угла.
Рисунок 6– Структурная схема локальной системы автоматического управления коленным суставом робота
Общая передаточная функция замкнутой системы будет иметь вид:


Проведем оценку устойчивости системы по критерию Ляпунова. Для устойчивости системы необходимо и достаточно, чтобы все корни характеристического уравнения замкнутой системы имели отрицательные вещественные части.
Характеристическое уравнение замкнутой системы имеет вид:

Найдем корни характеристического уравнения, используя пакет Mathcad:

Так как все вещественные части корней отрицательны, то это означает, что система устойчива.
Проверим систему на устойчивость по критерию Гурвица.
Для того, чтобы САУ была устойчива необходимо и достаточно, чтобы все определители Гурвица были положительны.
Главный определитель Гурвица составляют по следующим правилам:
-
по главной диагонали записывают коэффициенты, начиная с а1 и заканчивая аn,
-
недостающие элементы столбца вверх заполняются коэффициентами с возрастающими индексами, а вниз с уменьшающимися,
-
если номер индекса i>n или i<0, то на месте такого элемента записывается ноль.
На основании выше изложенных правил составим определители Гурвица и вычислим их:
 ;
;






Как видно из расчетов система устойчива, так как определители Гурвица положительны.
Построим переходный процесс замкнутой системы:
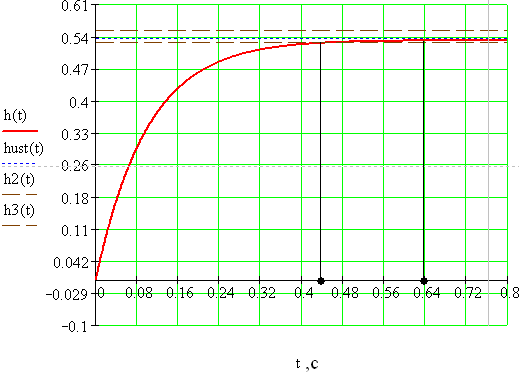


Рисунок 7- График переходного процесса замкнутой системы автоматического управления коленным суставом робота
Показатели качества системы:
–установившееся значение переходного процесса, hуст =0,54;
– время регулирования системы, tр= 0,43 с;
– время нарастания регулируемой величины и время
согласования, tн=tс=0,64 с;
– число колебаний за время регулирования, n=1;


С учетом этих показателей можно сделать вывод, качество управления САР соответствует требованиям нашей системы и не требует дополнительной коррекции.
Для определения косвенных показателей качества построим амплитудно-частотную характеристику замкнутой системы управления коленным суставом робота.
Косвенные показатели качества системы:
– резонансная частота, w0=0;
– полоса пропускания, wпр=0÷10 Гц;
– частота среза, wср= 60 Гц;





Рисунок 8– График амплитудно-частотной характеристики замкнутой системы управления коленным суставом робота
Таким образом, получаем, что аналоговая система является устойчивой, основные параметры удовлетворяют условиям технического задания.