

7.2 Расчет дискретного корректирующего устройства
Одним из методов коррекции стало применение программных корректирующих устройств на МП, применение которых позволяет варьировать параметры в широких пределах и быстро их изменять без изменения технического исполнения системы.
Дискретная коррекция заключается в составлении программы коррекции на том языке, на котором работает микропроцессор.
Для того чтобы составить программу коррекции необходимо получить характеристическое уравнение в реальном масштабе времени.
Произведем
замены и выполним z
– преобразование, согласно принятым
допущениям
![]() ,
,![]() .
.
![]()
Введем замену:
![]()
И проведем z – преобразование и получим передаточную функцию корректирующего устройства, которая примет вид:
![]()
Представим разностное уравнение в реальном масштабе времени:
![]()
Программа коррекции для микропроцессора, написанная на языке Assembler по составленному разностному уравнению в реальном масштабе времени:
i_port EQU 11h; номер порта для чтения
o_port EQU 12h; номер порта для записи
;Запишем данные в ячейки памяти начиная с адреса 0000.
DB 0; выделение памяти под переменные xk+1, x, xk-1, xk-2.
DB 1; выделение памяти под переменные уk+1, y, yk-1.
;вычисляем значение выражения;
у(k)= В3 ·x2+B2·y1+B1·y+ A4 ·x2+ A3 ·x2+ A2·x1+ A1·x
start: ;метка начала цикла коррекции
in al,i_port; чтение данных из порта (x)
mov x,al
mul
al,A1; вычисление слагаемого А1![]() х
х
mov bl,al; сохранение результата в bl
;
в результате имеем А1![]() х
в регистре bl
х
в регистре bl
mov al,х1;
mul
al,A2; слагаемое А2![]() х1
х1
add bl,al; прибавление к предыдущему результату
;в
результате имеем А1![]() х+А2
х+А2![]() х1
в регистре bl
х1
в регистре bl
mov al,х2;
mul
al,A3; слагаемое А3![]() х2
х2
в
результате имеем А3![]() х2
в регистре al
х2
в регистре al
add bl,al; прибавление к предыдущему результату
;в
результате имеем А1![]() х+А2
х+А2![]() х1+A3
х1+A3![]() x2
в регистре bl
x2
в регистре bl
;Повторение аналогичных действий для всех переменных.
; в регистре b1 имеем результат вычисления всего выражения
mov y1,y
mov y,bl
mov x2,x1
mov x1,x
mov x,bl
out o_port, bl; вывод управляющего сигнала из bl
jmp start; зацикливание на начало программы
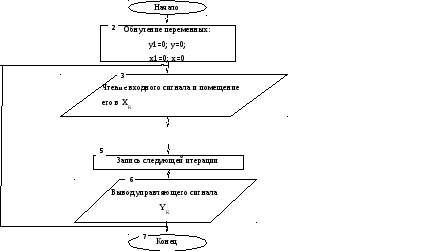
Блок - схема программы коррекции представлена на рисунке 17.
В качестве корректирующего устройства для система автоматического управления выбираем дискретное корректирующее устройство, так как нецелесообразно после микропроцессора в систему ставить корректирующее устройство, таким методом мы усложняем систему. А дискретное корректирующее устройство программно корректируем рассматриваемую проектируемую систему.
ОФОРМЛЕНО НЕ ПО СТАНДАРТУ
ОШИБКИ В КОРРЕКЦИИ
1
4
![]()
Рисунок 12 – Блок – схема программы коррекции