

2.4 Выбор датчика угла поворота
В качестве датчиков обратной связи принимаем индукционный двухотсчётный датчик угла ИПУ-ДУЦ. Индукционные двухотсчётные датчики угла класса синусно-косинусных вращающихся трансформаторов предназначены для применения в качестве двухотсчётных первичных преобразователей угла в цифровых системах "угол-параметр-код", а также в различных устройствах и системах дистанционной передачи угла. Конструктивно датчики выполнены двухфазными, без собственных подшипников и состоят из двух частей - статора и ротора, непосредственно встраиваемых в прибор.
Передаточная функция датчика обратной связи (индукционного двухотсчётного датчика угла) имеет вид:
![]()
где k – коэффициент усиления,
T – электромеханическая постоянная датчика.
Коэффициент усиления k можно определить по формуле:
![]() ,
,
где
![]() –
отклонение входной мощности,
–
отклонение входной мощности,
![]() – отклонение
выходной мощности редуктора.
– отклонение
выходной мощности редуктора.
Отклонение входной мощности датчика обратной связи относительно точки N0 определяется в виде:
![]()
где
![]() Вт.
Вт.
Отклонение выходной мощности датчика обратной связи относительно точки No определяется по формуле:
![]()
где
![]() Вт.
Вт.
Коэффициент усиления для датчика обратной связи определится в виде:
 .
.
Передаточная функция датчика обратной связи (индукционного двух отсчётного датчика угла) запишется в виде:
![]()
3 Расчет датчика обратной связи локальной системы
УПРАВЛЕНИЯ
Существует довольно большое количество датчиков угла поворота, разнообразной конструкции и видов.
Выбор датчика обусловлен, прежде всего:
- физической природой регулируемого параметра;
- желаемой формой выходного сигнала (в данном случае желателен электрический
выходной сигнал);
- высокой чувствительностью и чувствительностью;
- допустимой инерционностью;
- малым или отсутствием влияния внешних условий;
- возможностью настройки на различные значения регулируемого параметра;
- малой энергоемкостью;
- приемлемыми массогабаритные показателями;
- сроком службы.
В качестве датчиков обратной связи принимаем индукционный двухотсчётный датчик угла ИПУ-ДУЦ. Индукционные двухотсчётные датчики угла класса синусно-косинусных вращающихся трансформаторов предназначены для применения в качестве двухотсчётных первичных преобразователей угла в цифровых системах "угол-параметр-код", а также в различных устройствах и системах дистанционной передачи угла. Конструктивно датчики выполнены двухфазными, без собственных подшипников и состоят из двух частей - статора и ротора, непосредственно встраиваемых в прибор. Датчики выполняются из двух самостоятельных датчиков: грубого (ИПУ-ГО) и точного отсчёта (ИПУ-ТО).
Датчик ИПУ-ГО является двухполюсным классическим вращающимся трансформатором с синусоидально распределенными обмотками на роторе и статоре (по две квадратурных на каждом). Датчик ИПУ-ТО является многополюсным вращающимся трансформатором с сосредоточенными волновыми обмотками на сплошных магнитопроводах (на статоре - две квадратурные обмотки, на роторе - одна обмотка возбуждения). Конструктивно датчики выполняются аналогично асинхронным двигателям. Датчик выпускается совестно в комплекте с микропроцессорным комплексом (унифицированным цифровым вычислителем), полностью согласуется с выходным валом привода по угловой скорости, диаметру вала, частоте вращения вала, по степени защищенности, требуемому выходному сигналу, скорости изменения выходного сигнала.
Технические характеристики ИПУ-ДУЦ.
Номинальное напряжение питания, В 6.
Пусковой момент, не менее, Нм 0,35.
Диапазон напряжения питания, В 6÷12.
Электромеханическая постоянная датчика, сек 0,1.
Диапазон частот питания, кГц 1÷10.
Номинальная частота напряжения питания, кГц 4.
Коэффициент электрической редукции ИПУ-ТО 64.
Погрешность преобразования угла, не более угл.секунд. плюс 6,9.
Потребляемый ток, А, не более 0,13.
Максимальное выходное напряжение, В (ТО/ГО) 0,4/ 4.
Остаточная ЭДС, мВ, не более (ТО/ГО) 10/30.
Рассогласование электрических нулей, угл.минут. 15.
Масса, кг, не более 0,7.
Срок службы, лет, не менее 15.
Расчет датчика обратной связи сводится к расчету допустимой температуры нагрева обмотки, а также расчету некоторых геометрических характеристик.
Значение максимально-допустимой температуры обмотки:
![]()
где y – максимально допустимое напряжение, y = 1 103 кг/см2,
к – материал каркаса, к = 2,810-6 1/0С,
E – модуль упругости, E = 1,66 106 кг/см2,
Допустимое значение перегрева обмотки:
![]()
где Q0 max – максимальная температура окружающей среды, Q0 max = 450 0С
Диаметр провода обмотки из условия нагрева его максимальным током:
![]()
где к – коэффициент, который выбирается в пределах 0,5 1 и учитывает, что не вся поверхность провода охлаждается;
– материал провода (медь), = 0,54 Ом·мм2/м,
– коэффициент теплоотдачи, = 1,2510-3 Вт/см20С
Средняя длина витка обмотки:
![]()
где R0 – сопротивление датчика, R0 = 700 Ом,
f = (1,05 1,15) = 1,1.
Диаметр провода обмотки с изоляцией
![]()
Диаметр каркаса:
![]()
4 РАСЧЕТ УСТОЙЧИВОСТИ СИСТЕМЫ
4.1 Расчет передаточной функции системы автоматического управления солнечной батареей космического спутника
Рассмотрим структурную схему автоматического управления солнечной батареи космического спутника, представленную на рисунке 2.
W1(p)
W2(p)
W3(p)








W4(p)


Рисунок 2 – Структурная схема САУ солнечной батареей космического спутника
Передаточная функция микропроцессора:
![]()
Передаточная функция шагового двигателя:
![]()
Передаточная функция солнечной батареи:
![]()
Передаточная функция датчика угла поворота:
![]()
Рассчитаем общую передаточную функцию для системы:
![]()
![]()
![]()
![]()
![]()
4.2 Построение переходного процесса и амплитудно – частотной характеристики системы автоматического управления солнечной батареей космического спутника
Имеем общую передаточную функцию вида:
![]()
Воспользовавшись программой MathCAD найдем функцию переходного процесса, чтобы построить переходный процесс воспользуемся обратным преобразованием Лапласа.
![]()
График переходного процесс САУ солнечной батареей космического спутника представлен на рисунке 3.
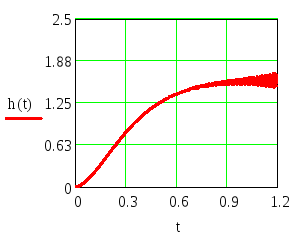
Рисунок 3 - График переходного процесса САУ солнечной батареей космического спутника
По графику можем сделать вывод, что переходный процесс является расходящимся, следовательно, можно сделать вывод что система не устойчива.
Для того чтобы построить амплитудо-частотную характеристику (АЧХ)
системы, необходимо провести замену оператора p на комплексное число i·ω, где i – мнимая единица, а ω – частота.
АЧХ:
![]() ,
,
где
![]() – действительная часть передаточной
функции;
– действительная часть передаточной
функции;
![]() – мнимая
часть передаточной функции
– мнимая
часть передаточной функции
Построим АЧХ (рисунок 4), используя прикладную программу MathCAD, и по графику определим косвенные оценки качества.
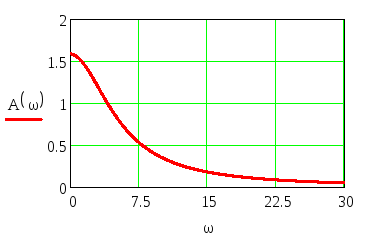
Рисунок 4 - Амплитудно – частотная характеристика САУ солнечной батареей космического спутника
Косвенные оценки качества САУ.
Максимальная амплитуда: Аmax=1.6.
Резонансная частота, Гц: ωр =0 .
Амплитуда при нулевой частоте А(0)=1.6.
Частота среза, Гц: ωср=3.8.
Полоса пропускания частот - диапазон частот от ω1 до ω2, который определяется величиной:
![]() ω1=3.75
Гц.
ω1=3.75
Гц.