

Расчет корректирующего устройства
По виду полученной ЛАЧХ Lку, подбираем корректирующее устройство из стандартных [4, с.507].
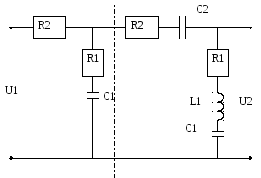
Рисунок 7- Корректирующее устройство
W
(21)![]() - передаточная функция первой части
корректирующего устройства
- передаточная функция первой части
корректирующего устройства
L0= 1
L∞=
T1= R1C1
T2=![]()
W
(22) - передаточная функция второй
- передаточная функция второй
ч

L 0=
0=
T1=R1C1
T2=![]()
Выбираем значения для элементов.
R1=10 Ом
R2=2 Ом
C1=2 мФ
C2=10 мФ
L1=7 Гн
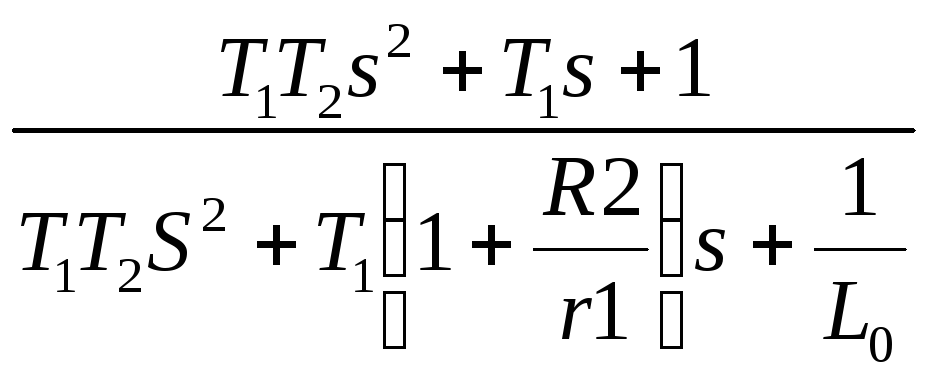
С учетом данных значений передаточная функция корректирующего устройства принимает вид:
Wкп(s)=![]() (23)
(23)
Корректирующее устройство представляет собой R-C цепочку, имеющую на входе и на выходе импульсы напряжения. Именно по этому его нельзя поставить непосредственно после системы тормоза или пер датчиком, т.к. датчик является следящим элементом и не может быть скорректирован.
Таким образом, наиболее предпочтительным вариантом остается включение корректирующего устройства в шкаф управления, т.е. между управляющим сигналом и самим двигателем в качестве усилителя сигнала.
П



 роверим
систему на качество управления, построив
переходный процесс скорректированной
системы:
роверим
систему на качество управления, построив
переходный процесс скорректированной
системы:










Рисунок 8- Функциональная схема скорректированной системы управления шаговым двигателем

О пределим
качество управления скорректированной
системы:
пределим
качество управления скорректированной
системы:

Hуст(t)
tрег

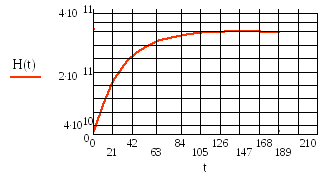
Рисунок 9- Переходный процесс скорректированной системы
Нуст= 3,51011 - установившееся состояние системы
tрег= 126.5c– время регулирования системы
=1% пере регулирование системы
Для корректирующей системы можно прибегнуть к помощи программы для микропроцессора, которая будет реализовать передаточную функцию корректирующего устройства. Чтобы составить программу необходимо найти разностное уравнение в реальном масштабе времени.
Проведем Z- преобразование передаточной функции корректирующего устройства с помощью формулы
(24)![]()
После подстановки в передаточную функцию корректирующего устройства, получим передаточную функцию скорректированной системы:
![]()

Р азностное
уравнение системы выглядит следующим
образом:
азностное
уравнение системы выглядит следующим
образом:
U
(20)
где U1- выходная функция;
U- входная функция.
Составляется программа на языке Ассемблер, по которой будет осуществляться управление:
;расчет формулы
; U1k(t)=0,265U1k-1+0,757U1k-2-0,334U1k-3+0,076Uk-1+0,129Uk-2-0,0524Uk-3-0,00103Uk-4
A1EQU0,265; задаем постоянные коэффициенты
A2EQU0,757; задаем постоянные коэффициенты
A3EQU0,334; задаем постоянные коэффициенты
A4EQU0,076; задаем постоянные коэффициенты
A5EQU0,129; задаем постоянные коэффициенты
A6EQU0,0524; задаем постоянные коэффициенты
A

U2 DB 0 ; выделение места под Ũ1к-2
U3 DB 0 ; выделение места под Ũ1к-3
U4DB 0 ; выделение места под Uк-1
U5 DB 0 ; выделение места под Uк-2
U6 DB 0 ; выделение места под Uк-3
U7 DB 0 ; выделение места под Uк-4
i port EQU 10h
port EQU 12h
step:
in al, i port;
MOV al, U1;
MUL al,A1 ; 0.265Ũ1k-1
 MOV bl,al ;
MOV bl,al ;
MOV al,U2 ;
MUL al,A2 ;
ADD bl,al ; 0.265Ũ1k-1+0.757· Ũ1k-2
MOV al,U3 ;
MUL A3;
SUB bl,al; 0.265Ũ1k-1+0.757· Ũ1k-2-0.334· Ũ1k-3
MOV al,U4;
MUL A4;
ADD bl,al; 0.265Ũ1k-1+0.757· Ũ1k-2-0.334· Ũ1k-3+0,076·Uк-1
MOV al,U5;
MUL A5;
ADD bl,al; 0,265·Ũ1к-1+0,757·Ũ1к-2 -0,334·Ũ1к-3+0,076·Uк-1+0,129·Uк-2
MOV al,U6;
SUBbl,al; 0,265·Ũ1к-1+0,757·Ũ1к-2 -0,334·Ũ1к-3+0,076·Uк-1+0,129·Uк-2 – -0,0524·Uк-3
MOV al,U7;
SUBbl,al; 0,265·Ũ1к-1+0,757·Ũ1к-2 -0,334·Ũ1к-3+0,076·Uк-1+0,129·Uк-2 –
-0,0524·Uк-3 -0,00103·Uк-4
MOV U6,bl;
MOV U2,U1;
out o port, bl;
JMP step; замыкание цикла.
И

 д=10мкс.
В результате можно найти время выполнения
всей прграммыв.пр.=15
мкс. Откуда следует, чтов.
пр.Т0.
технические характеристики используемого
микропроцессора удовлетворяют требованиям
по быстродействию.
д=10мкс.
В результате можно найти время выполнения
всей прграммыв.пр.=15
мкс. Откуда следует, чтов.
пр.Т0.
технические характеристики используемого
микропроцессора удовлетворяют требованиям
по быстродействию.
Блок-схема алгоритма коррекции представлена на рисунке 10.


Рисунок 10- Блок- схема корректирующей программы

З АКЛЮЧЕНИЕ
АКЛЮЧЕНИЕ
Разработанная система отвечает всем требованиям, указанным в техническом задании. Была проверена на устайчивость с помощью критерия Гурвица и является устойчивой. Для системы были построены ЛАЧХ неизменяеной части, ЖЛАЧХ, ЖФЧХ. С помощью ЛАЧХ скорректированной системы было выбрано корректирующее устройство, которое обеспечило коррекцию исходной системы в соответствии с ее техническими параметрами. Запасы устойчивости составляют:
запас устойчивости по амплитуде Lж=6 дБ,
запас устойчивости по фазе =0,6 град.
Т
