

Передаточные функции элементов системы
Шаговый электродвигатель определяется передаточной функцией следующего вида.
![]() (1)
(1)
где
![]() =0,49
–коэффициент передачи двигателя
(2)
=0,49
–коэффициент передачи двигателя
(2)
![]() =0,12с
– постоянная времени двигателя
(3)
=0,12с
– постоянная времени двигателя
(3)
![]() =1
(4)
=1
(4)
![]()

Т
 ормоз
описывается передаточным коэффициентом
вида:
ормоз
описывается передаточным коэффициентом
вида:
![]() =5
=5
![]()
где Fтр=N- сила трения;
Передаточная функция датчика перемещения поределяется из отношения выходного напряжения датчика к длине шунта.
![]() =23
- передаточный коэффициент определяющий
передаточное отношение датчика.
=23
- передаточный коэффициент определяющий
передаточное отношение датчика.
Кнопка может находиться в одном из двух положений либо замкнута либо разомкнута. В нашем случае кнопка считается нажатой, поэтому влияние кнопки на дальнейшую работу системы отсутствует. Передаточное отношение кнопки управления определяется в момент ее нажатия, поэтому его будем считать равным 1:
kкн=1
Шкаф управления выдает электрические импульсы напряжения, посылаемые к двигателю. Его работа определяет передаточным коэффициентом kшк, определяемый в момент срабатывания кнопки управления. Так как шкаф является дискретным элементом значение его коэффициентаkшкможно принять равным единице:
kшк=1
С учетом полученных передаточных выражений определим передаточную функцию незамкнутой системы управления шаговым двигателем:
![]() (5)
(5)
W(s)=![]()

Расчет датчика точной остановки кабины лифта
Анализ выбранного датчика на устойчивость от внешних помех.
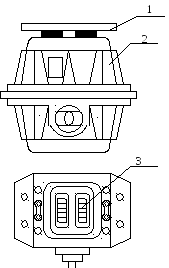
Шунт
Корпус
Магнитопровод
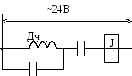
Электрическая
схема датчика
Рисунок 2- Индуктивный датчик тип ИКВ-30
Ток в катушке индуктивности, I,A2,5;
- циклическая частота срабатывания, 4πf, Гц 628;
– номинальное напряжение, U, B 127;
- полное сопротивление катушки датчика без якоря, Rk, Ом 40;
полное сопротивление катушки датчика с якорем, Rкя, Ом 6835.
Отношение
сопротивлений катушки
![]() =1,7.
=1,7.
В

ρст=0,65 1/мкГн- удельное поверхностное сопротивление стали
χ
 =1,15
1/мкГн- удельное поверхностное
сопротивление стали
=1,15
1/мкГн- удельное поверхностное
сопротивление стали
 0,5
0,5
 -линейная
плотность магнитного потока
-линейная
плотность магнитного потока
Количество витков 600, марка и диаметр провода ПЭЛ 1,68
Imax=3,20,16A–максимально допустимый ток в катушке
Вес датчика, 8кг.
Сопротивление изоляции 5МОм.
 =
300 Вт -выходная мощность датчика
=
300 Вт -выходная мощность датчика
![]() =
4,5 Ом -сопротивление воздушного зазора
=
4,5 Ом -сопротивление воздушного зазора
0=410-7– магнитная проницаемость воздушного зазора
G=ℓ- периметр сечения поля взаимодействия шунта и магнитопровода датчика.
Ферромагнитный сердечник усиливает индуктивность магнитопровода датчика. Изменение его индуктивности происходит при изменении положения сердечника. Таким образом, входной величиной датчика является перемещение, и передаточный коэффициент датчика будет иметь вид:
Kдт=![]()
Внешние помехи в основном возникают из-за наводимых в магнитопрводе вихревых токов. Для предотвращения помех необходимо снизить их величину путем установления границы возможных помех, а именно найти допустимую индуктивность чувствительного элемента датчика. Максимальная величина индуктивности L достигается при полном внесении сердечника в поле датчика, то есть, максимальное значение индуктивности будет при полном перекрытии магнитопровода, когда достигается равенстве длин шунта и магнитопровода в сечении магнитного поля:
ℓм= ℓш

 Следовательно,
чувствительность датчика точной
остановки зависит от того, на сколько
точно будет подобраны размеры шунта,
его площадь взаимодействия с полем
магнитопровода.
Следовательно,
чувствительность датчика точной
остановки зависит от того, на сколько
точно будет подобраны размеры шунта,
его площадь взаимодействия с полем
магнитопровода.
При подаче питания в поле магнитопровода возникает магнитный поток, определяемый по формуле:
![]() (6)
(6)
где U – выходное напряжение датчика,
ω- циклическая частота,
w-число витков магнитопровода
При этом в катушке магнитопровода наводится магнитодвижущая сила вызывающая рост индуктивности. Индуктивность можно найти по формуле:
L=![]() (7)
(7)
где w– число витков магнитопровода;
Z =Rδ +ZM–полное сопротивление участка цепи датчика
![]()
![]() –сопротивление
воздушного зазора
–сопротивление
воздушного зазора
ZМ= RМ+ ХМ - магнитное сопротивление магнитопровода,
где RМ, ХМактивная и реактивная составляющие магнитного сопротивления.
RM=![]()
ХМ=
![]()
Тогда полное магнитное сопротивление принимает вид
ZM=![]() +
+![]() =
=![]() (8)
(8)
Таким образом, зависимость выходного сигнала от входного можем выразить через полное сопротивление датчика. Оно имеет вид квадратичной зависимости:
U

П ри
проведении анализа геометрических
размеров датчика была предложена длина
шунта равная длине магнитопровода
ℓш=127мм.
ри
проведении анализа геометрических
размеров датчика была предложена длина
шунта равная длине магнитопровода
ℓш=127мм.
Система устойчива при подключении датчика точной остановки. В качестве датчика точной остановки используется индуктивный датчик, действие которого основано на преобразовании путем воздействия на подвижную часть его магнитной системы, роль которой играет ферромагнитный якорь. Проведем анализ полученной системы управления шаговым двигателем. Таким образом, основным расчетом датчика точной остановки является расчет его геометрических параметров. Из передаточной функции системы следует, что максимальное расстояние перемещения якоря составляет 127 мм. Следовательно, длина якоря 127 мм.
