

Расчет устойчивости системы
4.1 С учетом передаточных функций всех элементов составляем структурную схему системы:

Рисунок 3- Структурная схема системы управления
U=1- импульс напряжения от кнопки управления,
Uу=1 – импульс управления от шкафа управления,
шк=6800– угол поворота ротора двигателя,
lтроса– перемещение кабины лифта,
Uном=4,5910-4В –номинальное напряжение выдаваемое датчиком.
Uд- напряжение выдаваемое датчиком через усилитель
С учетов всего сказанного передаточная функция всей системы принимает вид:
(9)![]()
Проведем анализ устойчивости системы по критерию устойчивости Гурвица
С
(10)
где D(s)- характеристическое уравнение системы

D(s)=23s3+1,2s2 +s+0.035
Определители Гурвица примут вид
=1,288 =0,0138
1= 1
Согласно критерию система устойчива, если все определители положительны при значении коэффициента а0>0.
О

Построение логарифмической амплитудно-частотной характеристики неизменяемой части системы и ее анализ
Передаточную функцию системы записываем в частотном виде.
(11)![]()
К
(12)
![]()
(13)![]()
П (14)![]()

-40дБ
-60дБ
Р


А нализируя
полученную ЛАЧХ, можно отметить, что
система имеет малый передаточный
коэффициент. Это связано с тем, что
система дискретна, а построение
производится относительно частоты w.
ПроведемZ- преобразование
передаточной функции системы. Для этого
выражение (9) разложим на элементарные
дроби:
нализируя
полученную ЛАЧХ, можно отметить, что
система имеет малый передаточный
коэффициент. Это связано с тем, что
система дискретна, а построение
производится относительно частоты w.
ПроведемZ- преобразование
передаточной функции системы. Для этого
выражение (9) разложим на элементарные
дроби:
![]()
Представим передаточную функцию элементарных дробей в виде zпреобразований и тогда получим выражение (15).
![]() (15)
(15)
Вводим замену s =j
П
(16)

С

Построение желаемых логарифмических характеристик системы и корректирующего устройства системы
Построение ЖЛАХЧ системы
Так как система дискретна, для построения ЖЛАЧХ воспользуемся методом запретной зоны.
Необходимые показатели качества системы заданы в техническом задании:
tр= 1,5c– время срабатывания системы
=20%- значение пере регулирования
M=![]() =1,1-показатель
колебательности системы
=1,1-показатель
колебательности системы
Определим границу запретной зоны.
Максимально
допустимая ошибка системы доп=![]() =0,004.
=0,004.
Максимальная
скорость изменения сигнала
![]() =
=![]() =1,78 –первая производная от задающего
воздействия, полученная из анализа
работы системы.
=1,78 –первая производная от задающего
воздействия, полученная из анализа
работы системы.
Максимальное
ускорение изменения сигнала
![]() =
=![]() = 0,155 – вторая производная то задающего
воздействия.
= 0,155 – вторая производная то задающего
воздействия.
З
(17)
q = A sinkt,
где

А=![]() =7,510-3- рабочая амплитуда
=7,510-3- рабочая амплитуда
![]()
 =Аk=
1,78
=Аk=
1,78
![]() =Аk2= 0,155
=Аk2= 0,155
lg(к)=0,903
А
(18)![]() =1,5
=1,5
20lg(А1)=3,522
Определим частоту среза ср
(19)![]() =3.63c-1
=3.63c-1
Запретную зону
определяют граничные частоты 1=![]() ,2=
,2=![]() ,
,
где h=![]() =21.
=21.
После 2ЖЛАХЧ системы повторяет истинную ЛАЧХ. Совмещаемср с границей запретной зоны и от2продолжаем ЖЛАЧХ до наклона ЛАЧХ –60дБ.
Т
(20)
Lку()=W()-Lнч(),
где Wж() –ЖЛАЧХ системы
L

-20дБ



60 -40дБ
-40дБ
L1() -20дБ 20дБ
0дБ 0дБ


W()




-10 -40дБ 0дБ -20дБ 20дБ


Lку() -40дБ 0дБ
-60дБ -80

1 10 100 0.1 0.01 0.001 1000
,
c-1
Р
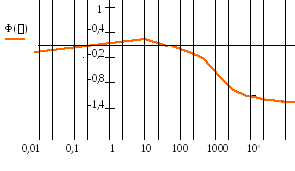
Ф()
,
c-1
Р

характеристика системы
П ри
анализе ЛАЧХ неизменяемой части системы
находим запасы устойчивости:
ри
анализе ЛАЧХ неизменяемой части системы
находим запасы устойчивости:
по амплитуде Lж=6 дБ,
з
апас устойчивости по фазе=0,60.