

3.3 Разработка принципиальной схемы
Спроектированная МПС посылает запрос READна чтение данных из порта Р1 от управляющего процесса (тахогенератора). Как только данные получены, о чем сигнализирует высокий уровень на входе Т0, МПС обрабатывает полученный код и выдает обработанные данные на порт Р2 и посылает модулю УСО сигналWRITEдля выдачи обработанной информации на рабочий орган (двигатель постоянного тока). Данные операции выполняются циклически и могут быть остановлены аппаратным сбросом КМ1816ВЕ48 (сигналRST).
Принципиальная электрическая схема МПС приведена в приложении А.
3.4 Алгоритм функционирования мпс
Согласно данным, полученным в третьей части курсового проекта, спроектированная МПС должна реализовать алгоритм работы цифрового П-регулятора. В силу вышесказанного алгоритм функционирования может быть представлен следующим образом (рисунок 3.4).
Текст программы, написанной на командах микроЭВМ КМ1816ВЕ48 приведен в приложении В.
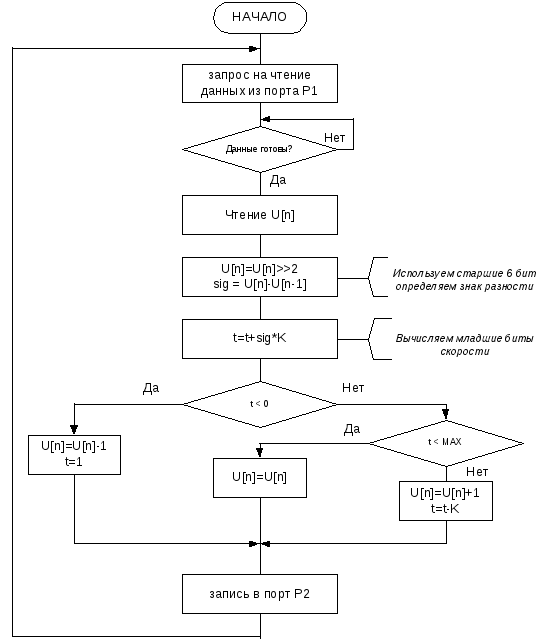
Рисунок 4.4.– Алгоритм функционирования МПС
4 Проектирование модуля сопряжения с объектом
4.1 Разработка дискретного регулятора
Для того, чтобы связать разработанную МПС с двигателем необходимо спроектировать цифровой регулятор для сопряжения с ДПТНВ, реализующий, полученный во второй части курсового проекта, закон регулирования. Структурная схема такого регулятора представлена на рисунке 4.1
Вход
Выход
Рисунок 4.1 – Структурная схема цифрового регулятора
Данную обобщенную схему можно конкретизировать. Более подробная структурная схема представлена на рисунке 4.2.

Рисунок 4.2 – Структурная схема цифрового регулятора
Ключевым вопросом при проектировании цифровых регуляторов, в нашем случае реализующих законы регулирования семейства П, является установление соответствия между параметрами непрерывного и дискретного регулятора, обеспечивающего адекватность характеристик.
U(t) = Ke(t).
Дискретная аппроксимация операторов интегрирования и дифференцирования порождает ошибки аппроксимации, которые в свою очередь искажают динамические характеристики как регулятора, так и всей системы в целом.
Для малых тактов квантования Т данное уравнение можно преобразовать в разностное с помощью дискретизации, состоящей в замене операций дифференцирования разностью первого порядка, а операций интегрирования – суммой, причем в последнем случае могут использоваться методы прямоугольников и трапеций.
U[k] = Ke[k];
U[k-1] = Ke[k-1].
Найдем разность этих выражений:
U[k] = U[k-1] + K(e[k] - e[k-1]).
Таким образом, получили дискретное уравнение регулировочной характеристики для дискретного П-регулятора, которая будет выглядеть так, как показано на рисунке 4.3.

Рисунок 4.3 – Регулировочная характеристика для дискретного П-регулятора
4.2 Разработка структурной схемы модуля спряжения
Выделяют следующие основные структурные компоненты модуля ввода/вывода аналогового сигнала: схема нормировки сигнала - приводит сигнал к необходимому виду и обеспечивает защиту по входу, фильтр низкой частоты - для отсеивания высокочастотных помех, устройство выборки - хранения - необходимо для фиксации уровня сигнала перед преобразованием, аналого-цифровой преобразователь - преобразование в бинарный код, цифро-аналоговый преобразователь (ЦАП), для выполнения обратного преобразования сигнала, фильтр низкой частоты, исполнительный механизм.При разработке структуры модуля необходимо решить вопрос первичности скорости работы устройства и его стоимости. Первоначальная структурная схема показана на рисунке 4.4., где СНиПФ - схема нормировки и полосовой фильтр, УВХ - устройство выборки-хранения, АЦП - аналого-цифровой преобразователь, ЦАП – цифро-аналоговый преобразователь, ФНЧ – фильтр низкой частоты.

Рисунок 4.4 – Структурная схема модуля сопряжения с объектом
Общий алгоритм работы схемы можно описать следующим образом: при поступлении от МПС сигнала чтения данных происходит АЦП преобразование, и полученные данные записываются в память МПС. Далее на программном уровне происходит обработка данных (согласно рекуррентному соотношению, полученному в пункте 4.1) и обработанные данные сохраняются в памяти МПС. Далее, по сигналу записи, обработанные данные загружаются в ЦАП и происходит обратное преобразование. Полученный на выходе ЦАП аналоговый сигнал передается на исполнительный механизм.