

1.2 Влияние изменения параметров на характеристики системы
Для исследования влияния изменения параметров двухмассовой упругой системы на характеристики этой системы воспользуемся полной схемой, изображенной на рисунке 1.5.

Рисунок 1.5 – Полная схема двухмассовой упругой системы
При исследовании системы оцениваем влияние параметров:
коэффициента жесткости С12;
момента инерции механизма J2;
коэффициента демпфирования 12.
Коэффициент жесткости вычисляется следующим образом:
![]() где=1–2– угол
скручивания, М12– момент упругого
взаимодействия.
где=1–2– угол
скручивания, М12– момент упругого
взаимодействия.
Сначала принимаем J2=J1= 0,0042 Нм.
С помощью программного комплекса SystemViewстроим переходные характеристики при= 1 (рисунок 1.6),= 2 (рисунок 1.7),= 0,5 (рисунок 1.8).
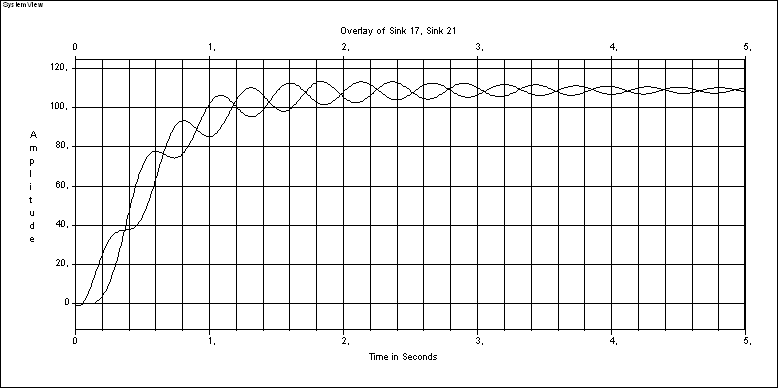
Рисунок 1.6 – Переходный процесс при С12= МHиJ2=J1
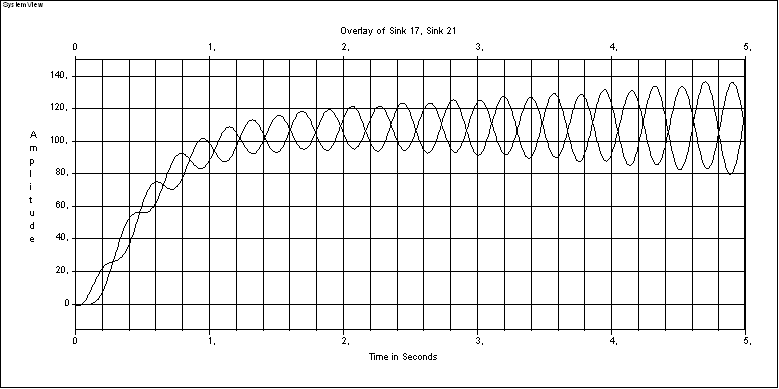
Рисунок 1.7 – Переходный процесс при С12= 2МHиJ2=J1
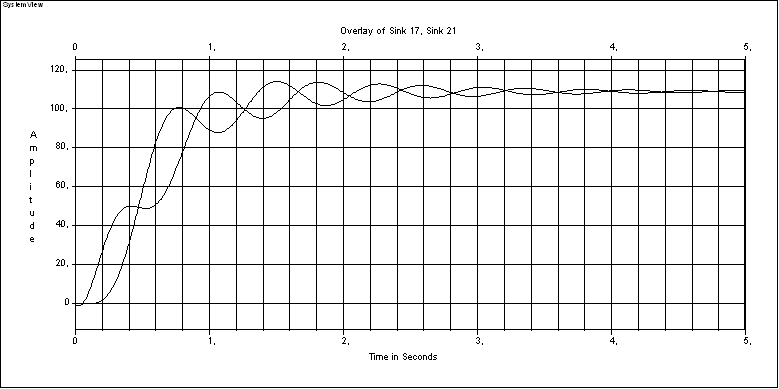
Рисунок 1.8 – Переходный процесс при С12= МH/2 иJ2=J1
Принимаем J2=J1/2 = 0.021 Нм и строим переходные характеристики при= 1 (рисунок 1.9),= 2 (рисунок 1.10),= 0,5 (рисунок 1.11).

Рисунок 1.9 – Переходный процесс при С12= МHиJ2=J1/2

Рисунок 1.10 – Переходный процесс при С12= 2МHиJ2=J1/2
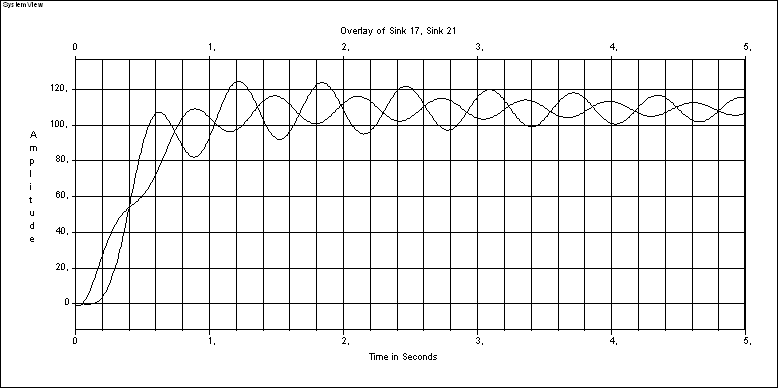
Рисунок 1.11 – Переходный процесс при С12= МH/2 иJ2=J1/2
Принимаем J2= 2J1= 0.084 Нм и строим переходные характеристики при= 1 (рисунок 1.12),= 2 (рисунок 1.13),= 0,5 (рисунок 1.14).
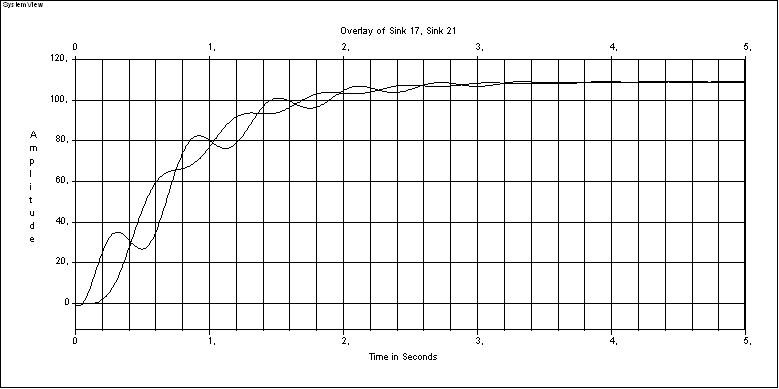
Рисунок 1.12 – Переходный процесс при С12= МHиJ2= 2J1
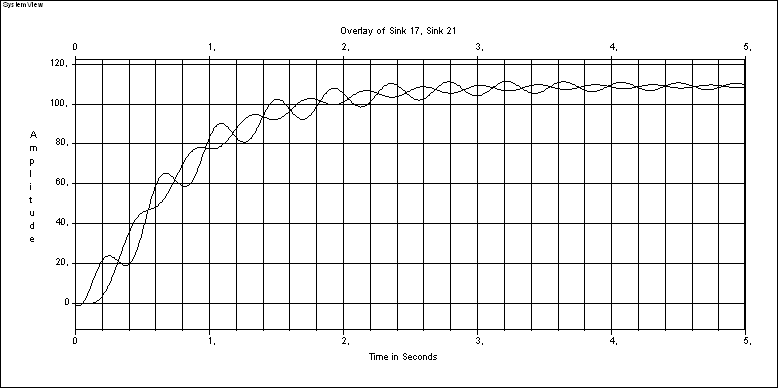
Рисунок 1.13 – Переходный процесс при С12= 2МHиJ2= 2J1
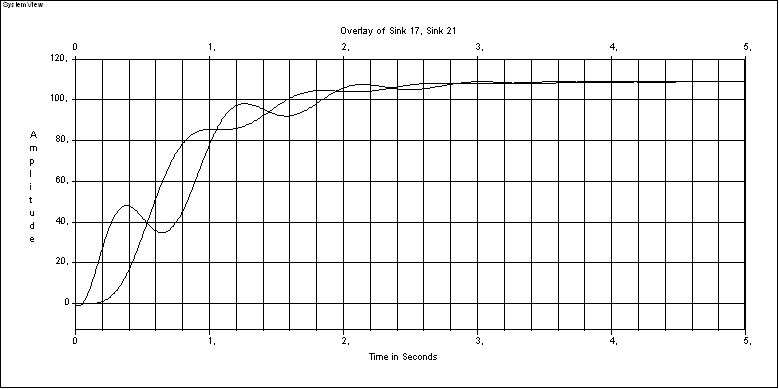
Рисунок 1.14 – Переходный процесс при С12= МH/2 иJ2= 2J1
Введем в схему демпфирование, которое должно уменьшить колебания и привести к установлению процесса.
Величина коэффициента 12вычисляется по формуле:
![]() где Мв.т.– момент вязкого трения,1-2возьмём равным 4.
где Мв.т.– момент вязкого трения,1-2возьмём равным 4.
Таким образом
![]()
Демпфирование введем в схему с большим колебательным процессом при С12= 2МНиJ2=J1(рисунок 1.7).
После ввода демпфера получается процесс, изображенный на рисунке 1.15.
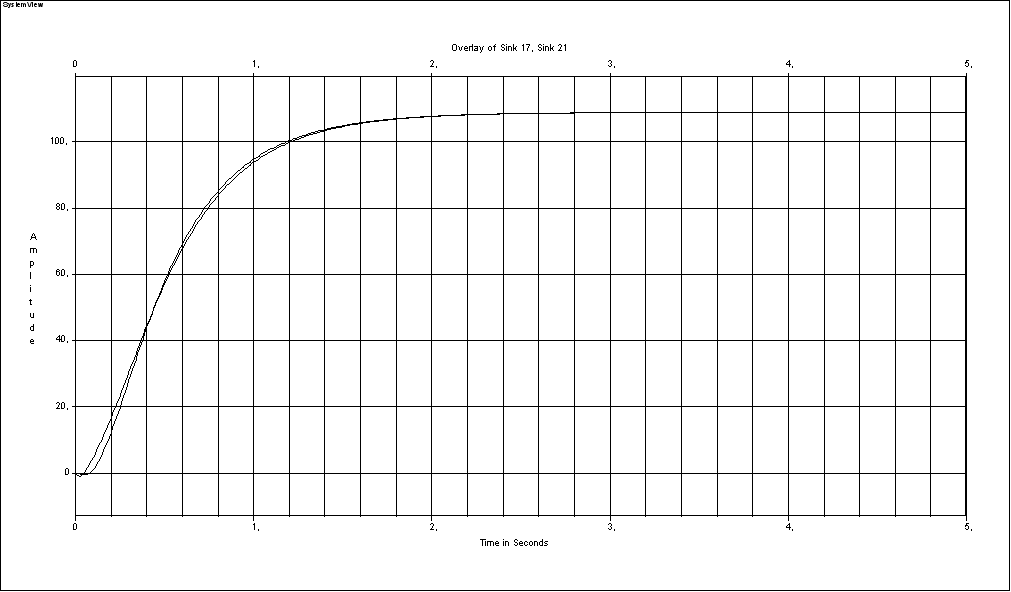
Рисунок 1.15 – Переходный процесс при введении демпфера
1.3 Выводы по первой главе
В данной главе были получены характеристики заданного двигателя и проведены исследования по влиянию изменений параметров двухмассовой системы на её характеристики. Из полученных графиков, можно сделать выводы:
с увеличением коэффициента жёсткости колебания в системе возрастают;
при маленьком коэффициенте жёсткости и моменте инерции, система наиболее устойчива;
при большом моменте инерции система быстрее приходит в устойчивое состояние;
введение в систему демпфера значительно повышает её устойчивость.
2 Выбор закона регулирования. Определение оптимальных параметров настройки
При выборе регулятора воспользуемся установленными заданием требованиями, сведенными в таблице 2.1.
Таблица 2.1 – Исходные данные для выбора типа регулятора
|
K |
Т, с |
τ, с |
tp, c |
Ψ, % |
Δxдоп |
yв |
х1доп |
|
3,2 |
100 |
25 |
250 |
55 |
10 |
12 |
25 |
где Kоб-коэффициент передачи объекта,
Тоб-постоянная времени объекта,
τоб-время запаздывания объекта,
tp-допустимое время регулирования,
Ψ -допустимое перерегулирование,
Δxдоп-допустимое остаточное отклонение,
yв- максимально возможное возмущение по нагрузке,
Δxдоп-максимальное допустимое динамическое отклонение.
Исходя из значения Ψ, определяем, что у нас процесс с минимальной квадратичной площадью отклонения параметра.
Тип регулятора определяется отношением /Т.

В нашем случае /Т = 25/100 = 0,25, следовательно, регулятор непрерывный.
Пользуясь исходными данными, определяем величину динамического коэффициента регулирования Rд, при котором может быть получено требуемое значение динамического отклонения.
![]()
Зная тип переходного процесса, определяем тип регулятора в зависимости от значений τ/Т и Rд(по графику на рисунке 2.1). Из графика видно, что в данном случае имеет место П-закон регулирования.
Далее необходимо проверить регулятор на величину остаточного отклонения регулируемой величины от заданного значения и на соответствие фактического времени регулирования заданному.
Из графика на рисунке 2.2 определим отношение tp/τ и выразим отсюда tp.
tp/τ = 8,tp = 200, что не больше заданного значения.
Из графика на рисунке 2.3 определим допустимое перерегулирование δдоп, а исходя из него и остаточное отклонение Δx.
δдоп=0,2,
![]() .
.
Полученное значение Δx < Δxдоп, следовательно закон выбран правильно.
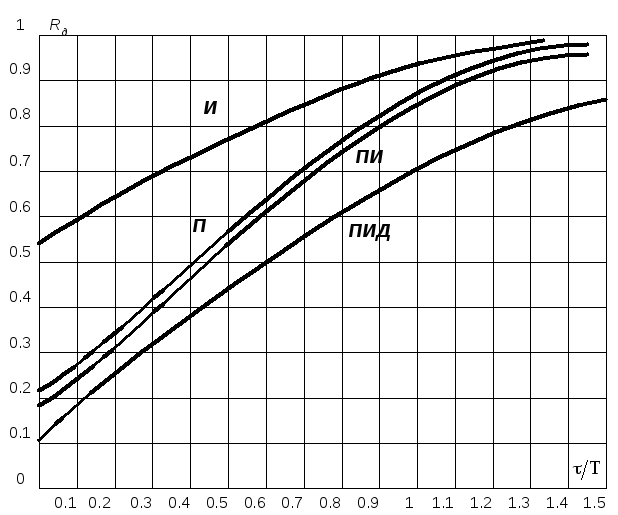
Рисунок 2.1 – График для выбора закона регулирования для переходного процесса с минимальной квадратичной площадью отклонения

Рисунок 2.2 – График для проверки на соответствие времени регулирования
для переходного процесса с минимальной квадратичной площадью отклонения
апериодический
с 20% перерегулированием
с минимальной
квадратичной площадью отклонения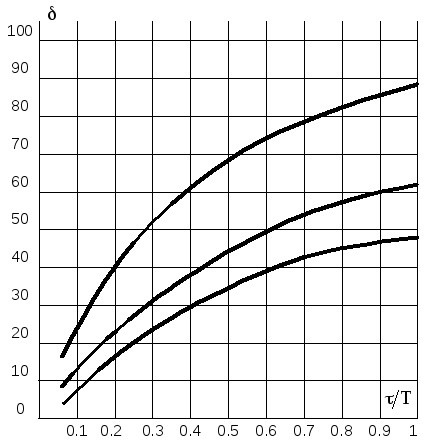
Рисунок 2.3 – График для поверки регулятора на соответствие остаточного отклонения регулируемой величины
Схема, реализующая П-регулятор выглядит следующим образом для идеального регулятора (рисунок 2.4)
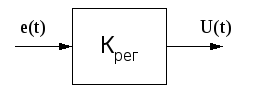
Рисунок 2.4 - Схема идеального П-регулятора
Рассчитаем параметры настройки регулятора:
Крег= .
.
График регулятора представлен на рисунке 2.5.

Рисунок 2.5 – График регулятора