

курсовая работа / для курсача по ТАУ / rgz
.pdfИндуктивность обмотки управле- |
0,05 |
0,45 |
0,8 |
1,2 |
1,7 |
ния Lу , гн |
|
|
|
|
|
Активное сопротивление обмотки |
20 |
100 |
200 |
300 |
360 |
управления Rу , ом |
|
|
|
|
|
Активное сопротивление выход- |
10 |
50 |
100 |
150 |
180 |
ного канала усилителя Rвых , ом |
|
|
|
|
|
10.2. Электрогидравлический следящий привод
с силовой обратной связью в гидроусилителе Электрогидравлический следящий привод, схема которого приведена на
рис. 10.2, состоит из усилителя электрических сигналов, электромеханического преобразователя, гидроусилителя, исполнительного двигателя, датчика обрат- ной связи. Гидроусилитель имеет усилительную ступень в виде сопла-заслонки и управляющую ступень в виде золотникового распределителя. Силовую об- ратную связь в гидроусилителе выполняет упругий стержнь, жестко связанного одним концом с заслонкой, а другим - с золотником. В качестве исполнитель- ного гидродвигателя используется гидроцилиндр.

Рис. 10.2. Электрогидравлический следящий привод с силовой обратной связью
вгидроусилителе
Вкачестве датчика обратной связи применен потенциометр, щетка по- тенциометра непосредственна закреплена штоке гидроцилиндра, а каркас с об- моткой потенциометра жестко связан с корпусом гидроцилиндра.
Усилитель электрических сигналов выполняет две функции: сравнивает напряжение с выхода потенциометра с управляющим напряжением, а получен- ную разность напряжений усиливает.
Привод работает следующим образом. При подаче управляющего напря- жения на вход усилителя 1 возникает ток в обмотке управления, и якорь элек- тромеханического вместе с заслонкой 2 отклоняется от нейтрального положе- ния; золотник 3 гидроусилителя под действием разности управляющих давле- ний смещается от нейтрального положения, соединяя одну полость гидроци- линдра 4 с напорной линией, а другую – со сливной линией. Поршень 5 под
действием разности давлений в полостях гидроцилиндра перемещается до тех пор, пока управляющее напряжение не будет скомпенсировано напряжением,

подводимым к усилителю с выхода потенциометра 6 обратной связи. После этого ток в обмотке управления электромеханического преобразователя стано- вится равным нулю, якорь, заслонка и золотник приходят в нейтральное поло- жение, а поршень гидроцилиндра занимает новое установившееся положение. Таким образом, изменяя управляющее напряжение на входе в усилитель 1, можно управлять положением выходного звена привода.
Описание динамики электрогидроусилителя выполнить без учета массы золотника, силы трения и сжимаемости жидкости при малых отклонениях за- слонки от нейтрального положения.
Внешнюю моментную характеристику электромеханического преобразо- вателя использовать в виде линейной зависимости момента M я , развиваемого
якорем от тока управления iу и угла ϕя поворота якоря
M я = KM .iiу − KM .ϕϕя
где KM .i , KM .ϕ - коэффициенты внешней моментной характеристики. Демпфирующий момент M Д , возникающий при вращении якоря опреде-
лять по формуле |
|
|
|
|
dϕя |
|||
|
M Д |
= K Д .я |
||||||
где K Д.я |
|
dt |
||||||
- коэффициент демпфирования якоря. |
|
|
||||||
Гидродинамическую силу, действующую со стороны потока рабочей |
||||||||
жидкости на заслонку, определять по формуле |
|
|
|
|||||
|
F з |
|
= χ |
с |
f |
с |
p |
у |
где χс - |
Г . Д |
|
|
|
||||
коэффициент, равный 1,03-1,06 при соплах с острыми кромками; |
||||||||
fс = πdс2 |
4 - площадь проходного сечения сопла (здесь dс - диаметр канала |
|||||||
сопла). |
|
|
|
|
|
|
|
|
Так как заслонка жестко связана с одной стороны с якорем, а с другой – с упругим стержнем, и имеет возможность поворачиваться вокруг оси совместно
с ними, то гидродинамическая сила FГз. Д и сила Fо.с , изгибающая стержень, при повороте заслонки и перемещении якоря, создают момент M н
Mн = FГз. Д l + Fо.сlо.с ,
где l - расстояние от центра вращения до оси сопел; lо.с - расстояние от центра
вращения до оси золотника.
Этот момент необходимо учесть при составлении уравнения динамики
якоря.
Силу Fо.с , изгибающую стержень, можно определить по известному из
сопротивления материалов соотношению
F |
= |
3Eст Icтlо.с |
ϕ |
я |
+ |
3Eст Icт |
x |
, |
|
|
|||||||
о.с |
|
lст3 |
|
lст3 |
з |
|
||
|
|
|
|
|
|
|||

где Eст - модуль упругости материала, из которого изготовлен стержень; Iст - момент инерции сечения стержня относительно главной центральной оси, пер- пендикулярной к плоскости изгибающей силы; lст - длина стержня; ϕя - угол поворота заслонки; xз - перемещение золотника.
Силу трения считать вызванной жидкостным трением и определять по формуле
Fт р = kт р dxdtз ,
где kтр - коэффициент трения, x з - перемещение золотника.
Зависимость расхода жидкости Qу , обеспечивающего перемещение зо- лотника, от отклонения hу заслонки от нейтрального положения и разности давлений pу = pу1 − pу2 в полостях А и Б заменить линейной зависимостью
Qу = KQhhу − KQp pу ,
где KQh и K Qp - коэффициенты линеаризации.
Гидродинамическую силу FГД , действующую на золотник со стороны
жидкости, протекающей через золотниковый распределитель к исполнительно- му двигателю, определять по формуле
FГД = −2cГД xз ,
где cГД - коэффициент жесткости гидродинамической пружины (гидродинами-
ческая сила имеет линейную зависимость аналогично силе пружины отсюда и название коэффициента).
Вместо реальной расходно-перепадной характеристики золотникового
распределителя использовать аппроксимированную характеристику
Qз = KQ.x xз − KQ. p pн ,
где KQ.x и KQ. p - коэффициенты линеаризации; xз - малое отклонение пере- мещения золотника относительно перемещения xз.0 , соответствующего устано- вившемуся режиму; pн = p1 − p2 - малое отклонение перепада давлений в по-
лостях гидроцилиндра относительно перепада, соответствующего установив- шемуся режиму.
Любой привод при работе должен преодолевать те нагрузки (силы и мо- менты сил), которые действуют на его выходное звено со стороны управляемо- го объекта. При расчетах приводов следует учитывать инерционную и позици- онную нагрузки, а также силы трения. Инерционная нагрузка создается масса- ми перемещаемых с ускорением частей управляемого объекта и выходного зве- на. Массы перемещаемых приводом частей при исследовании его динамики

обычно заменяют приведенной к направлению движения выходного звена мас- сой.
Позиционная нагрузка характеризуется зависимостью преодолеваемых приводом усилий от перемещения выходного звена. Позиционную нагрузку оп-
ределять по линейной зависимости от положения выходного звена
F = cн yшт ,
где cн - коэффициент нагрузки; yшт - перемещение штока.
Силы трения, нагружающие выходное звено привода, возникают при движении частей управляемого объекта в окружающей среде, а также вследст-
вие трения в элементах соединения выходного звена с управляемым объектом и вследствие трения в исполнительном гидродвигателе. Силу трения определять
по формуле
Fт р = kт р dyшт , dt
где kтр - коэффициент трения.
Зависимость напряжения uо.с на выходе потенциометра от перемещения щетки yщ принять линейной
uо.с = Kп.о.с yщ ,
где Kп.о.с - коэффициент передачи потенциометра.
Так как щетка потенциометра непосредственно закреплена на штоке гид- роцилиндра, yщ = yшт .
Усилитель электрических сигналов считать пропорциональным звеном,
для описания которого использовать уравнение
uус = K ус (uвх − uо.с ) ,
где Kус - коэффициент усиления усилителя; uвх - управляющее напряжение на входе усилителя; uус - напряжение на выходе усилителя.
Напряжение uус и ток iу в обмотке управления электромеханического
преобразователя считать связанными уравнением
uус = Lу didtу + (Rу + Rвых )iу ,
где Lу -индуктивность обмотки управления; Rу - активное сопротивление об- мотки управления; Rвых - активное сопротивление выходного канала усилителя.
Значения параметров для различных вариантов приведены в таблице 10.2.

Таблица 10.2
ПАРАМЕТРЫ |
|
|
|
ВАРИАНТ |
|
|
||||||||
|
|
|
|
|
|
|
|
1 |
2 |
|
3 |
|
4 |
5 |
Коэффициенты |
|
|
|
KM .i ×10−2 |
1,1 |
1,2 |
|
1,3 |
|
1,4 |
1,5 |
|||
внешней |
|
момент- |
|
(н×м/а) |
|
|
|
|
|
|
|
|||
ной характеристики |
|
|
|
|
|
|
|
|
|
|
||||
|
KM .ϕ |
×10−3 |
1,1 |
1,2 |
|
1,3 |
|
1,4 |
1,5 |
|||||
ЭМП |
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
(н×м/рад) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Коэффициенты |
|
|
|
KQ.h , м2 с |
0,6 |
0,7 |
|
0,4 |
|
0,4 |
0,8 |
|||
расходно- |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
KQ. p ×1010 , |
2 |
2,5 |
|
3 |
|
3,5 |
4 |
||
перепадной |
харак- |
|
|
|
||||||||||
теристики ГУ |
|
|
|
м3 (Па × с) |
|
|
|
|
|
|
|
|||
Коэффициент |
|
демпфирования |
1 |
1,5 |
|
2 |
|
2,5 |
3 |
|||||
якоря K Д .я ×10−3 , н × м × с рад |
|
|
|
|
|
|
|
|||||||
Момент |
|
инерции |
якоря |
2 |
3 |
|
4 |
|
5 |
6 |
||||
I я ×102 , н × м ×с2 |
|
( рад)2 |
|
|
|
|
|
|
|
|
||||
Расстояние |
от |
центра вращения |
20 |
25 |
|
30 |
|
35 |
40 |
|||||
заслонки до оси сопел l, мм |
|
|
|
|
|
|
|
|||||||
Диаметр сопел dс , мм |
|
3 |
4 |
|
5 |
|
3,5 |
4,5 |
||||||
Коэффициент χс |
|
|
1,03 |
1,04 |
|
1,05 |
|
1,06 |
1,05 |
|||||
Масса золотника m ×10−2 , кг |
7 |
8 |
|
9 |
|
10 |
12 |
|||||||
Объем каждой из полостей А и Б, |
50 |
60 |
|
70 |
|
80 |
90 |
|||||||
Vу ×106, м3 |
|
|
|
|
|
|
|
|
||||||
Коэффициент трения kтр , |
|
1 |
1,5 |
|
2 |
|
2,5 |
3 |
||||||
н ( м с) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
Коэффициент жесткости гидро- |
|
|
|
|
|
|
|
|||||||
динамической пружины |
|
2 |
3 |
|
4 |
|
5 |
6 |
||||||
c ×10−5 , |
н м |
|
|
|
|
|
|
|
|
|
|
|
|
|
ГД |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Модуль |
объемной |
упругости |
|
|
|
|
|
|
|
|||||
жидкости Bж ×10−9 , Па |
|
1,2 |
1,3 |
|
1,4 |
|
1,3 |
1,2 |
||||||
Коэффициент жесткости |
пружи- |
|
|
|
|
|
|
|
||||||
ны cпр ×10−3 , н м |
|
|
20 |
40 |
|
60 |
|
80 |
90 |
|||||
Коэффициенты |
|
KQ.x , м2 |
с |
1 |
1,1 |
|
0,9 |
|
1,2 |
0,8 |
||||

расходно- |
ха- |
|
KQ. p ×1010 , |
1 |
1,1 |
0,9 |
1,2 |
0,8 |
||||
перепадной |
|
м3 |
(Па × с) |
|
|
|
|
|
||||
рактеристики |
|
|
|
|
|
|
|
|||||
гидрораспреде- |
|
|
|
|
|
|
|
|
|
|||
лителя |
|
|
|
|
|
|
|
|
|
|
|
|
Масса (штока и |
поршня с учетом |
400 |
500 |
600 |
700 |
800 |
||||||
приведенной массы регулируемо- |
|
|
|
|
|
|||||||
го объекта) m , кг |
|
|
|
|
|
|
|
|
||||
Диаметр |
поршня |
гидроцилиндра |
100 |
120 |
140 |
160 |
200 |
|||||
Dп , мм |
|
|
|
|
|
|
|
|
|
|
|
|
Диаметр |
штока |
гидроцилиндра |
60 |
80 |
90 |
100 |
120 |
|||||
dшт , мм |
|
|
|
|
|
|
|
|
|
|
|
|
Ход поршня lх , мм |
|
|
500 |
600 |
700 |
800 |
900 |
|||||
Модуль |
объемной |
упругости |
1,2 |
1,3 |
1,4 |
1,3 |
1.2 |
|||||
жидкости B |
|
×10−9 , Па |
|
|
|
|
|
|
||||
|
ж |
|
|
|
|
|
|
|
|
|
|
|
Коэффициент |
передачи |
потен- |
1 |
1 |
1 |
1 |
1 |
|||||
циометра Kп.о.с |
|
|
|
|
|
|
|
|
||||
Коэффициент |
усиления усилите- |
1 |
1 |
1 |
1 |
1 |
||||||
ля Kус |
|
|
|
|
|
|
|
|
|
|
|
|
Индуктивность обмотки управле- |
0,05 |
0,45 |
0,8 |
1,2 |
1,7 |
|||||||
ния Lу , гн |
|
|
|
|
|
|
|
|
|
|
|
|
Активное сопротивление обмотки |
20 |
100 |
200 |
300 |
360 |
|||||||
управления Rу , ом |
|
|
|
|
|
|
|
|||||
Активное |
сопротивление |
выход- |
10 |
50 |
100 |
150 |
180 |
|||||
ного канала усилителя Rвых , ом |
|
|
|
|
|
|||||||
Модуль |
упругости |
материала |
2 |
2,1 |
2,2 |
2,1 |
2 |
|||||
стержня E |
×1011 |
, Па |
|
|
|
|
|
|
||||
|
ст |
|
|
|
|
|
|
|
|
|
|
|
Момент инерции сечения стержня |
5 |
6 |
7 |
8 |
9 |
|||||||
Iст ×1013, м4 |
|
|
|
|
|
|
|
|
|
|
|
|
Длина стержня lст , мм |
|
20 |
30 |
40 |
25 |
35 |
||||||
Расстояние от оси вращения за- |
60 |
80 |
90 |
100 |
120 |
|||||||
слонки до оси золотника lо.с , мм |
|
|
|
|
|
|||||||
11. СИСТЕМЫ С АВТОМАТИЧЕСКИМИ РЕГУЛЯТОРАМИ
В гидросистемах и пневмосистемах применяют гидравлические и пнев- матические регуляторы, предназначенные для стабилизации скорости выходно- го звена двигателя, расхода рабочей жидкости и давления.
Источники питания гидроприводов с дроссельным регулированием и пневмоприводов в большинстве случаев должны быть снабжены регуляторами давления, так как при различных режимах работы один и тот же привод по- требляет разные расходы рабочей жидкости, вызывая тем самым изменение давления источника питания. Наибольшее распространение получили два спо- соба регулирования давления. При одном способе регулятор в зависимости от давления в напорной линии пропускает больше или меньшее количество рабо- чей жидкости в сливную, поддерживая давление питания привода в заданных пределах. В качестве регуляторов используют переливные клапана прямого и непрямого действия или автоматы разгрузки источников питания.
При другом способе регулятор управляет производительностью насоса. Регуляторы давления применяют также в гидросистемах и пневмосисте-
мах при управлении усилиями, развиваемыми исполнительными двигателями. Для поддержания заданной скорости движения выходного звена исполни-
тельного двигателя применяются регуляторы расхода рабочей жидкости.
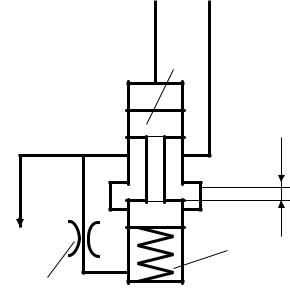
11.1. Система с переливным клапаном
прямого действия
Гидросистема, показанная на рис. 11.1, работает следующим образом. На установившемся режиме поток рабочей жидкости с расходом Qи от источника
питания разделяется на две части: одна часть с расходом Qп поступает к потре- бителю, другая часть с расходом Qкл идет через переливной клапан на слив.
Пока все выше указанные расходы постоянны, постоянным остается давление в напорной гидролинии и положение переливного клапана 1, находящегося в равновесии под действием сил давления жидкости и пружины 2. При измении нагрузки на выходное звено гидродвигателя изменяется потребный расход Qп и
давление в напорной гидролинии. Это изменение давления нарушает равнове- сие сил, действующих на клапан 1, что вызывает перемещение последнего и уменьшение или увеличение проходного сечения канала клапана, пропускаю- щего рабочую жидкость на слив. Изменение проходного сечения ведет к уменьшению или увеличению расхода Qкл , что вызывает востановление давле-
ния в напорной гидролинии. Таким образом в напорной линии гидросистемы давление поддерживается клапаном 1 с пружиной 2. При перемещении клапана рабочая жидкость протекает через дроссель 3, в результате чего обеспечивается демпфирование клапана.
Трубопроводы от источника 4 питания к потребителю 5 и к клапану счи- тать достаточно короткими для того, чтобы процессы в них можно было бы
описывать без учета распределенности параметров рабочей жидкости по длине гидролинии. Следовательно, значения давлений в этих трубопроводах считать одинаковыми.
4 |
|
5 |
|
||
|
|
|
1
hкл |
2 |
3
Рис. 11.1. Система с переливным клапаном прямого действия
Динамику системы рассмотреть при малых отклонениях переменных от установившихся значений. За установившийся принять режим гидросистемы соответствующий смещению hкл0 клапана относительно нулевого перекрытия
клапаном щели (т.е. проходного сечения), пропускающей рабочую жидкость на слив. За входное воздействие принять малые отклонения расхода, поступающе- го от источника, и расхода подводимого к потребителю. За выходную (регули- руемую) величину принять отклонение давления в напорной гидролинии от ус- тановившегося значения. Дроссель считать выполненным в виде цилиндриче- ского канала диаметром d ДР и длиной lДР . Значение параметров для различ-
ных вариантов приведены в таблице 11.1.

Таблица 11.1
|
|
ПАРАМЕТРЫ |
|
|
|
ВАРИАНТ |
|
||
|
|
|
|
|
1 |
2 |
3 |
4 |
5 |
Диаметр клапана dкл , мм |
|
20 |
25 |
32 |
25 |
20 |
|||
Масса клапана mкл , кг |
|
0,07 |
0,08 |
0,09 |
0,1 |
0,12 |
|||
Объем напорной гидролинии V0 , м3 |
0,001 |
0,002 |
0,003 |
0,004 |
0,005 |
||||
Коэффициент трения kтр , н/(м/с) |
|
1 |
1,5 |
2 |
2,5 |
3 |
|||
Модуль объемной упругости |
жидкости |
1,2 |
1,3 |
1,4 |
1,3 |
1,2 |
|||
Bж ×10−9 , Па |
|
|
|
|
|
|
|
|
|
Смещение клапана относительно нулевого |
2 |
4 |
6 |
8 |
10 |
||||
перекрытия щели hкл0 , мм |
|
|
|
|
|
|
|||
Давление в напорной гидролинии на уста- |
10 |
14 |
17 |
21 |
25 |
||||
новившемся режиме pп0 , МПа |
|
|
|
|
|
|
|||
Жесткость пружины cпр ×10−3 , н/м |
20 |
40 |
60 |
80 |
90 |
||||
Коэффициент |
жесткости гидродинамиче- |
200 |
300 |
400 |
500 |
600 |
|||
ской пружины c |
|
×10−3 , н/м |
|
|
|
|
|
|
|
|
ГД |
|
|
|
|
|
|
|
|
Плотность жидкости ρ , кг / м3 |
|
840 |
850 |
860 |
870 |
880 |
|||
Коэффициент |
кинематической |
вязкости |
1 |
2 |
2,5 |
1,5 |
3 |
||
жидкости ν ×104 , |
|
м2 с |
|
|
|
|
|
|
|
Давление в сливной гидролинии pсл , МПа |
0,1 |
0,15 |
0,2 |
0,25 |
0,3 |
||||
Диаметр канала дросселя d ДР , мм |
2 |
2,5 |
3 |
2,5 |
2 |
||||
Длина канала дросселя lДР , мм |
|
20 |
25 |
30 |
25 |
20 |
|||
11.2.Система с регулятором расхода
Вгидроприводе без обратных связей для поддержания скорости выходно-
го звена исполнительного гидродвигателя независимо от действующей на него нагрузки применяют регуляторы расхода, так как расход жидкости связан со скоростью выходного звена. Схема одного из таких регуляторов, подключенно- го к гидроцилиндру на сливе, приведена на рис. 11.2.