

курсовая работа / для курсача по ТАУ / rgz
.pdfКоэффициент |
использования |
периметра |
0,7 |
0,8 |
0,9 |
1 |
0,85 |
|
золотника K п |
|
|
|
|
|
|
|
|
Плотность жидкости ρ, кг м3 |
|
840 |
850 |
860 |
870 |
880 |
||
Модуль |
объемной упругости |
жидкости |
1,2 |
1,3 |
1,4 |
1,3 |
1,2 |
|
Bж ×10−9 , Па |
|
|
|
|
|
|
|
|
Коэффициент нагрузки cн ×10−3 , н/м |
10 |
12 |
14 |
16 |
20 |
|||
Коэффициент трения Kт р , н/(м/с) |
2 |
4 |
6 |
8 |
10 |
|||
Давление питания pп , МПа |
|
10 |
12 |
14 |
16 |
20 |
||
Давление в сливной магистрали pс , МПа |
0,1 |
0,15 |
0,2 |
0,24 |
0,3 |
|||
Коэффициент передачи механизма управ- |
1 |
1,2 |
1,4 |
1,6 |
1,8 |
|||
ления K x h |
|
|
|
|
|
|
|
|
Коэффициент обратной связи Kо.с |
1 |
1,2 |
1,4 |
1,6 |
2 |
|||
Коэффициент |
жесткости |
пружины |
30 |
35 |
40 |
45 |
50 |
|
ch ×10−4 , н м |
|
|
|
|
|
|
|
|
Коэффициент |
кинематической |
вязкости |
1 |
2 |
2,5 |
1,5 |
3 |
|
n ×104, м2 |
с |
|
|
|
|
|
|
|
Диаметр канала дросселя dк , мм |
|
2 |
2,5 |
3 |
2,5 |
2 |
||
Длина канала дросселя lк , мм |
|
20 |
25 |
30 |
25 |
20 |
||
8. ГИДРОУСИЛИТЕЛИ
Гидроусилителями называют устройства, увеличивающие мощность управляющих сигналов благодаря использованию энергии, подводимой с пото- ком жидкости от внешнего источника. В соответствии с этим определением к гидроусилителям часто относят также гидроприводы с дроссельным или объ- емным регулированием, имеющие механическое управление. Например, гидро- приводы, предназначенные для управления рулями самолета или автомобиля- ми, также называют гидроусилителями. Однако в теории автоматического ре- гулирования и управления усилителями принято считать только те устройства,
которые применяют для соединения маломощных чувствительных элементов или маломощных, преобразующих сигналы управления, элементов с более мощными исполнительными элементами. С учетом именно такого назначения используется приведенное выше понятие “гидроусилитель” в настоящих мето- дических указаниях.
8.1. Гидроусилитель с золотником нагруженным пружинами
Гидроусилитель, схема которого приведена на рис. 8.1, состоит из золот- ника 1, пружин 2, нерегулируемого дросселей 3, заслонки 4 и сопел 5. В гидро-
усилителе перепад давлений в полостях А и Б, необходимый для управления золотником 1, создается при отклонении заслонки 4 от нейтрального положе- ния вследствие изменения расходов через сопла 5. Для обеспечения пропор- циональной зависимости перемещений золотника от перемещений заслонки, применены пружины 2. Усилие этих пружин при смещении золотника от ней- трального положения уравновешивают силы давлений, приложенные к нему со стороны жидкости в полостях А и Б.
5
2
Рис. 8.1. Схема гидроусилителя с золотником нагруженным пружинами
Описание динамики гидроусилителя с золотником нагруженным пружи- нами с учетом массы золотника, силы трения и сжимаемости жидкости выпол- нить при малых отклонениях заслонки от нейтрального положения.
Силу трения считать вызванной жидкостным трением и определять по формуле
Fт р = kт р dxdtз ,
где kт р - коэффициент трения, x з - перемещение золотника.
Реальную зависимость расхода жидкости Qу , обеспечивающего переме- щение золотника, от отклонения hу заслонки от нейтрального положения и разности давлений pу = pу1 − pу2 в полостях А и Б заменить линейной зависи-
мостью
Qу = KQhhу − KQp pу ,
где KQh и K Qp - коэффициенты линеаризации.
Гидродинамическую силу FГД , действующую на золотник со стороны
жидкости, протекающей через золотниковый распределитель к исполнительно- му двигателю, определять по формуле
FГД = −2cГД xз ,
где cГД - коэффициент жесткости гидродинамической пружины (гидродинами-
ческая сила имеет линейную зависимость аналогично силе пружины отсюда и название коэффициента).
За входное воздействие принять отклонение заслонки от нейтрального положения, а за выходную величину (т.е. регулируемую) принять перемещение золотника. Значение параметров для различных вариантов приведены таблице
8.1.

|
|
|
|
|
|
|
|
|
Таблица 8.1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
ПАРАМЕТРЫ |
|
|
ВАРИАНТ |
|
|
|
|||
|
|
|
1 |
2 |
|
3 |
|
4 |
|
5 |
Коэффициенты рас- |
KQ.h , м2 с |
0,6 |
0,7 |
|
0,5 |
|
0,4 |
|
0,8 |
|
ходно-перепадной |
|
|
|
|
|
|
|
|
|
|
KQ. p ×1010 , |
2 |
2,5 |
|
3 |
|
3,5 |
|
4 |
||
характеристикики |
|
|
|
|||||||
|
|
м3 (Па × с) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Масса золотника m ×10−2 , кг |
7 |
8 |
|
9 |
|
10 |
|
12 |
||
Объем каждой из полостей А и Б, |
50 |
60 |
|
70 |
|
80 |
|
90 |
||
Vу ×106, м3 |
|
|
|
|
||||||
Коэффициент трения kтр , |
1 |
1,5 |
|
2 |
|
2,5 |
|
3 |
||
н ( м с) |
|
|
|
|
|
|
|
|
|
|
Коэффициент жесткости гидро- |
|
|
|
|
|
|
|
|
||
динамической пружины |
2 |
3 |
|
4 |
|
5 |
|
6 |
||
c ×10−5 |
, н м |
|
|
|
|
|
|
|
|
|
ГД |
|
|
|
|
|
|
|
|
|
|
Модуль |
объемной |
упругости |
|
|
|
|
|
|
|
|
жидкости Bж ×10−9 , Па |
1,2 |
1,3 |
|
1,4 |
|
1,3 |
|
1,2 |
||
Коэффициент жесткости пружи- |
|
|
|
|
|
|
|
|
||
ны cпр ×10−3 , н м |
|
20 |
40 |
|
60 |
|
80 |
|
90 |
|
8.2.Гидроусилитель с силовой обратной связью
Схема гидроусилителя с силовой обратной связью от золотника к заслон- ке показана на рис. 8. 2. Гидроусилитель состоит из золотника 4, нерегулируе- мых дросселей 5, заслонки 1 , сопел 2 и упруго стержня 1, закрепленного одним концом к заслонке, а другим - к золотнику.
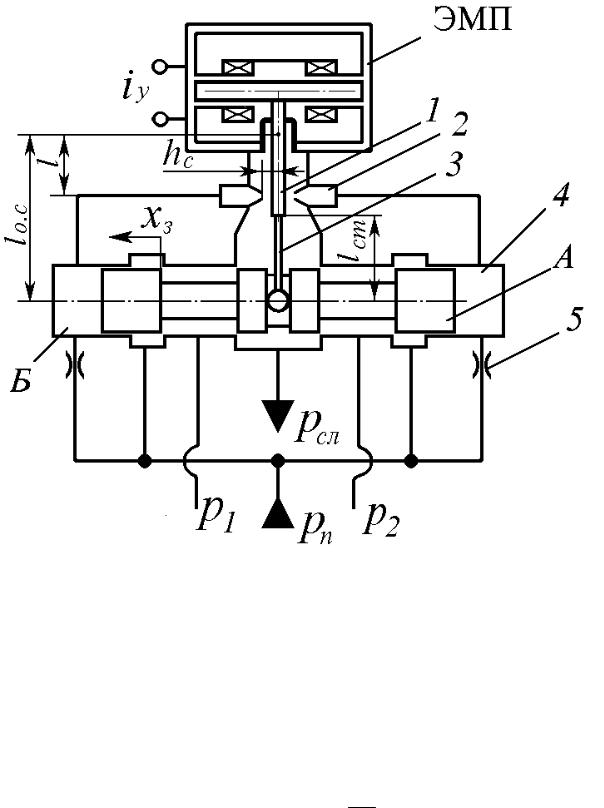
Рис. 8. 2. Схема гидроусилителя с силовой обратной связью
В гидроусилителе перепад давлений в полостях А и Б, необходимый для управления золотником , создается при отклонении заслонки от нейтрального положения вследствие изменения расходов через сопла. Упругий стержень обеспечивает обратную силовую связь от золотника к заслонке.
Описание динамики гидроусилителя выполнить с учетом массы золотни- ка, силы трения и сжимаемости жидкости выполнить при малых отклонениях заслонки от нейтрального положения.
Силу трения считать вызванной жидкостным трением и определять по формуле
Fт р = kт р dxdtз ,
где kтр - коэффициент трения, x з - перемещение золотника.
Зависимость расхода жидкости Qу , обеспечивающего перемещение зо- лотника, от отклонения hу заслонки от нейтрального положения и разности давлений pу = pу1 − pу2 в полостях А и Б заменить линейной зависимостью
Qу = KQhhу − KQp pу ,
где KQh и K Qp - коэффициенты линеаризации.
Силу Fо.с , действующую на золотник со стороны стержня, определять по
известной из сопротивления материалов формуле
F = 3Eст Iстlо.с ϕ |
я |
+ |
3Eст Iст x |
, |
||
ст |
lст3 |
|
lст3 |
з |
|
|
|
|
|
|
|
||
где Eст - модуль упругости материала, из которого изготовлен стержень; Iст - момент инерции сечения стержня относительно главной центральной оси, пер- пендикулярной к плоскости изгибающей силы; lо.с - расстояние от оси враще- ния заслонки до оси золотника; lст - длина стержня; ϕя - угол поворота заслон- ки относительно нейтрального положения.
Гидродинамическую силу FГД , действующую на золотник со стороны
жидкости, протекающей через золотниковый распределитель к исполнительно- му двигателю, определять по формуле
FГД = −2cГД xз ,
где cГД - коэффициент жесткости гидродинамической пружины (гидродинами-
ческая сила имеет линейную зависимость аналогично силе пружины отсюда и название коэффициента).
За входное воздействие принять отклонение заслонки от нейтрального положения, а за выходную величину (т.е. регулируемую) принять перемещение золотника.
Значение параметров для различных вариантов приведены таблице 8.2.

Таблица 8.2
|
ПАРАМЕТРЫ |
|
|
ВАРИАНТ |
|
|||
|
|
|
|
1 |
2 |
3 |
4 |
5 |
Масса золотника m, кг |
|
0,07 |
0,08 |
0,09 |
0,1 |
0,12 |
||
Объем |
каждой из |
полостей |
А и Б |
540 |
60 |
70 |
80 |
90 |
Vу ×10−6, м3 |
|
|
|
|
|
|
|
|
Коэффициент трения kтр , н/(м/с) |
|
1 |
1,5 |
2 |
2,5 |
3 |
||
Коэффициент жесткости гидродинамиче- |
2 |
3 |
4 |
5 |
6 |
|||
ской пружины cГД ×10−5 , н/м |
|
|
|
|
|
|
||
Модуль |
объемной |
упругости |
жидкости |
1,2 |
1,3 |
1,4 |
1,3 |
1,2 |
B ×10−9 |
, Па |
|
|
|
|
|
|
|
ж |
|
|
|
|
|
|
|
|
Модуль |
упругости |
материала |
стержня |
2 |
2,1 |
2,2 |
2,1 |
2 |
Eст ×109 , Па |
|
|
|
|
|
|
|
|
Момент |
инерции |
сечения |
стержня |
5 |
6 |
7 |
8 |
9 |
Iст ×1013, м4 |
|
|
|
|
|
|
|
|
Длина стержня lст , мм |
|
20 |
30 |
40 |
30 |
40 |
||
Расстояние от оси вращения заслонки до |
60 |
80 |
90 |
100 |
120 |
|||
оси золотника lо.с , мм |
|
|
|
|
|
|
|
|
Коэффициент KQh, м2 с |
|
0,6 |
0,7 |
0,5 |
0,4 |
0,8 |
||
Коэффициент KQp ×1010 , м3 (Па × с) |
2 |
2,5 |
3 |
3,5 |
4 |
|||
9. ЭЛЕКТРОГИДРАВЛИЧЕСКИЕ УСИЛИТЕЛИ
Электрогидравлический усилитель представляет собой устройство, в ко- тором объединены электромеханический преобразователь и гидроусилитель.
Электромеханический преобразователь воспринимает электрический сигнал и преобразует его в линейное или угловое перемещение якоря, связанного с зо- лотником, заслонкой или струйной трубкой (элемента усилительной ступени гидроусилителя). При этом якорь будет нагружен усилиями, действующими со стороны потока рабочей жидкости на золотник, заслонку или струйную трубку.
Таким образом в электрогидравлическом усилителе управляемым элементом электромеханического преобразователя служит управляющий элемент гидро- усилителя. Входной величиной у гидроусилителя является перемещение управ- ляющего элемента (золотника, заслонки или струйной трубки). За выходную
величину гидроусилителя принимают перемещение управляемого золотника (элемента управляющей ступени гидроусилителя) либо расход жидкости, на- правляемой к исполнительному двигателю. Применяемые в следящих приводах электрогидравлические усилители разнообразны по принципу действия и кон- структивному исполнению.
9.1. Электрогидравлический усилитель с золотником
нагруженным пружинами
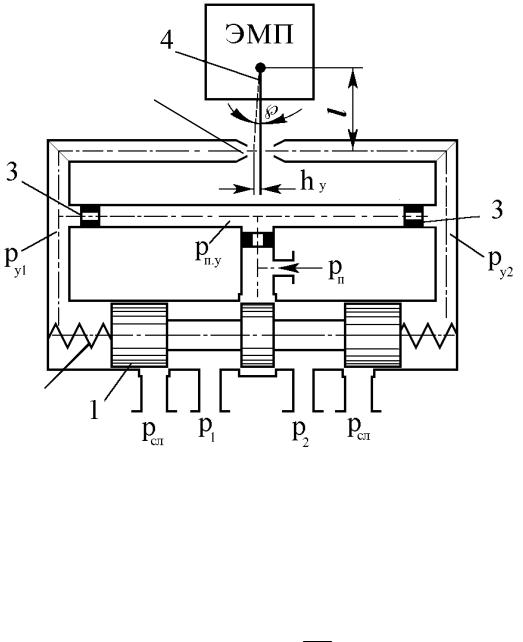
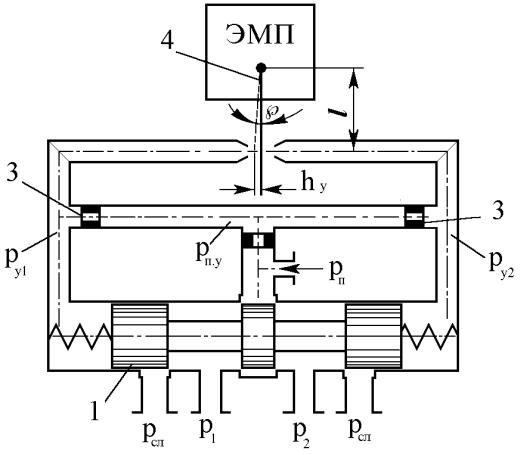
Электрогидравлический усилитель с золотником нагруженным пружина- ми состоит из электромеханического преобразователя (ЭМП) и гидроусилителя (ГУ), имеющего усилительную ступень в виде сопла-заслонки и управляющую ступень в виде золотникового распределителя. Схема электрогидравлического усилителя приведена на рис. 9.1. Гидроусилитель состоит из золотника 1, пру- жин, нерегулируемых дросселей 3, заслонки 4 и сопел.
Электрогидравлический усилитель работает следующим образом. При подаче напряжения на ЭМП в обмотке управления возникает ток, и якорь ЭМП вместе с заслонкой 4 отклоняются от нейтрального положения. Отклонение за- слонки 4 от нейтрального положения вызывает изменение расходов через сопла и перепад давлений в полостях А и Б, необходимый для управления золотником
1.
Для обеспечения пропорциональной зависимости перемещений золотни- ка от перемещений заслонки, применены пружины 2. Усилие этих пружин при смещении золотника от нейтрального положения уравновешивают силы давле- ний, приложенные к нему со стороны жидкости в полостях А и Б.
Рис. 8.1. Схема гидроусилителя с золотником нагруженным пружинами

Описание динамики электрогидроусилителя с золотником нагруженным пружинами с учетом массы золотника, силы трения и сжимаемости жидкости выполнить при малых отклонениях заслонки от нейтрального положения.
Внешнюю моментную характеристику электромеханического преобразо- вателя использовать в виде линейной зависимости момента M я , развиваемого
якорем от тока управления iу и угла ϕя поворота якоря
M я = KM .iiу − KM .ϕϕя
где KM .i , KM .ϕ - коэффициенты внешней моментной характеристики. Демпфирующий момент M Д , возникающий при вращении якоря опреде-
лять по формуле
|
|
M Д = K Д .я |
dϕя |
|
||||||
где K Д.я |
|
dt |
||||||||
- коэффициент демпфирования якоря. |
||||||||||
|
|
|
||||||||
|
Гидродинамическую силу, действующую со стороны потока рабочей |
|||||||||
жидкости на заслонку, определять по формуле |
|
|
|
|
||||||
|
|
F з |
= χ |
с |
f |
с |
p |
у |
||
|
χс - |
Г . Д |
|
|
|
|||||
где |
коэффициент, равный 1,03-1,06 при соплах с острыми кромками; |
|||||||||
fс |
= πdс2 |
4 - площадь проходного сечения сопла (здесь dс - диаметр канала |
||||||||
сопла).
Так как заслонка жестко связана с якорем и имеет возможность повора- чиваться вокруг оси совместно с ним, то гидродинамическую приложенную к заслонке нужно учесть при составлении уравнения вращения якоря.
Силу трения считать вызванной жидкостным трением и определять по формуле
Fт р = kт р dxdtз ,
где kт р - коэффициент трения, x з - перемещение золотника.
Зависимость расхода жидкости Qу , обеспечивающего перемещение зо- лотника, от отклонения hу заслонки от нейтрального положения и разности давлений pу = pу1 − pу2 в полостях А и Б заменить линейной зависимостью
Qу = KQhhу − KQp pу ,
где KQh и K Qp - коэффициенты линеаризации.
Гидродинамическую силу FГД , действующую на золотник со стороны
жидкости, протекающей через золотниковый распределитель к исполнительно- му двигателю, определять по формуле
FГД = −2cГД xз ,

где cГД - коэффициент жесткости гидродинамической пружины (гидродинами-
ческая сила имеет линейную зависимость аналогично силе пружины отсюда и название коэффициента).
За входное воздействие принять отклонение заслонки от нейтрального положения, а за выходную величину (т.е. регулируемую) принять перемещение золотника. Значение параметров для различных вариантов приведены таблице
9.1.
|
|
|
|
|
|
|
|
|
|
|
|
Таблица 9.1 |
|
|
|
|
|
|
|
|
|
|
|
||||
ПАРАМЕТРЫ |
|
|
|
ВАРИАНТ |
|
|
|||||||
|
|
|
|
|
|
|
1 |
2 |
|
3 |
|
4 |
5 |
Коэффициенты |
|
|
KM .i ×10−2 |
1,1 |
1,2 |
|
1,3 |
|
1,4 |
1,5 |
|||
внешней |
момент- |
|
(н×м/а) |
|
|
|
|
|
|
|
|||
ной характеристики |
|
|
|
|
|
|
|
|
|
||||
|
KM .ϕ ×10−3 |
1,1 |
1,2 |
|
1,3 |
|
1,4 |
1,5 |
|||||
|
|
|
|
|
(н×м/рад) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Коэффициенты |
|
|
KQ.h , м2 с |
0,6 |
0,7 |
|
0,4 |
|
0,4 |
0,8 |
|||
расходно- |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
KQ. p ×1010 , |
2 |
2,5 |
|
3 |
|
3,5 |
4 |
||
перепадной |
|
харак- |
|
|
|
||||||||
теристики |
|
|
|
|
м3 |
(Па × с) |
|
|
|
|
|
|
|
Коэффициент |
|
демпфирования |
1 |
1,5 |
|
2 |
|
2,5 |
3 |
||||
якоря K Д .я ×10−3 , н × м × с рад |
|
|
|
|
|
|
|
||||||
Момент |
|
инерции |
якоря |
2 |
3 |
|
4 |
|
5 |
6 |
|||
I я ×102 , н × м ×с2 |
( рад)2 |
|
|
|
|
|
|
|
|
||||
Расстояние |
от |
центра |
вращения |
20 |
25 |
|
30 |
|
35 |
40 |
|||
заслонки до оси сопел l, мм |
|
|
|
|
|
|
|
||||||
Диаметр сопел dс , мм |
|
3 |
4 |
|
5 |
|
3,5 |
4,5 |
|||||
Коэффициент χс |
|
|
1,03 |
1,04 |
|
1,05 |
|
1,06 |
1,05 |
||||
Масса золотника m ×10−2 , кг |
7 |
8 |
|
9 |
|
10 |
12 |
||||||
Объем каждой из полостей А и Б, |
50 |
60 |
|
70 |
|
80 |
90 |
||||||
Vу ×106, м3 |
|
|
|
|
|
|
|
|
|||||
Коэффициент трения kтр , н × с м |
1 |
1,5 |
|
2 |
|
2,5 |
3 |
||||||
К-т жесткости гидродинамиче- |
|
|
|
|
|
|
|
||||||
ской пружины cГД ×10−5, н м |
2 |
3 |
|
4 |
|
5 |
6 |
||||||
Модуль объемной |
упругости |
|
|
|
|
|
|
|
|||||
жидкости Bж ×10−9 , Па |
|
1,2 |
1,3 |
|
1,4 |
|
1,3 |
1,2 |
|||||
Коэффициент |
жесткости пружи- |
|
|
|
|
|
|
|
|||||
ны cпр ×10−3 , н м |
|
|
20 |
40 |
|
60 |
|
80 |
90 |
||||