

Дискретизация последовательного корректирующего звена методом введения фиктивных квантователей и фиксаторов
Рассмотрим метод введения фиктивных фиксаторов и квантователей. Применим фиксатор нулевого порядка, тогда передаточная функция корректирующего устройства будет выглядеть следующим образом:

Таким образом, получаем:
![]()
Учитывая, что
![]() получим дискретную передаточную
функцию замкнутой сиcтемы:
получим дискретную передаточную
функцию замкнутой сиcтемы:
![]()
Устойчивость полученной дискретной
системы может быть проанализирована
по расположению полюсов передаточной
функции
![]() ,
которые для устойчивой системы должны
находиться внутри единичной окружности
комплексной плоскости. В противном
случае необходимо
,
которые для устойчивой системы должны
находиться внутри единичной окружности
комплексной плоскости. В противном
случае необходимо
 уменьшить период дискретизации системы.
уменьшить период дискретизации системы.
Полюса дискретной передаточной функции следующие:
z1= 0.738 + 0.279i,
z2= 0.738 - 0.279i,
z3= 0.974,
z4= 0.955 + 0.033i,
z5= 0.955 - 0.033i.
Все корни попадают в область, ограниченную единичной окружностью на z-плоскости, поэтому дискретная система устойчива.
Выведем алгоритм коррекции:
Исходя из того что
 ,
,
![]()
Раскрыв скобки, поделив левую и правую
части уравнения на
![]() и перейдя
и перейдя
от изображений к оригиналам, получим:
![]()
Выразим
![]()
![]() Аналогично
можно получить конечно-разностное
уравнение для цифрового
Аналогично
можно получить конечно-разностное
уравнение для цифрового
моделирования замкнутой дискретной САУ с передаточной функцией:

![]() Применим
данные выкладки конкретно к нашему
уравнению и перепишем уравнение в
следующем виде:
Применим
данные выкладки конкретно к нашему
уравнению и перепишем уравнение в
следующем виде:
![]()
Раскрыв скобки, поделив левую и правую
части уравнения на
![]() и перейдя
и перейдя
от изображений к оригиналам, получим:
![]()
 Выразим
Выразим![]()
![]()
Получим конечно-разностное уравнение для цифрового моделирования замкнутой дискретной САУ:
Перепишем уравнение в следующем виде:
Раскрыв скобки, поделив левую и правую
части уравнения на
![]() и перейдя
и перейдя
от изображений к оригиналам, получим:

Выразим
![]()

 Для
полученной дискретной системы получим
переходную характеристику (рис.15.):
Для
полученной дискретной системы получим
переходную характеристику (рис.15.):
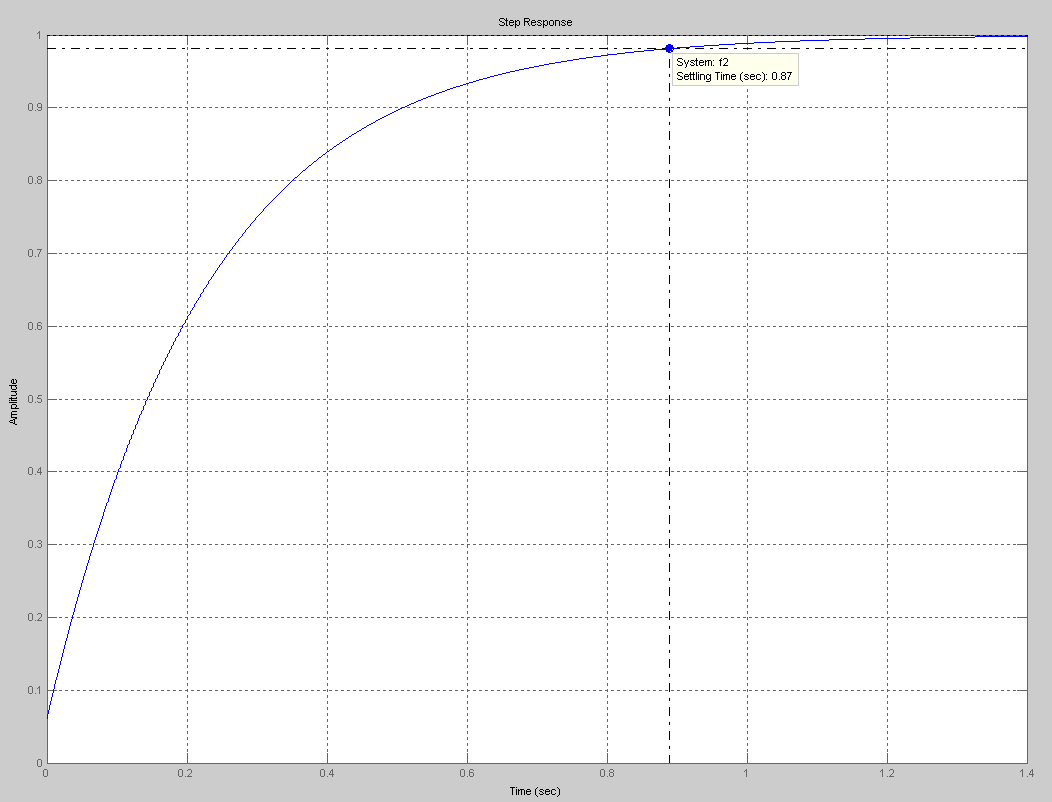
Рис.15. Переходная характеристика дискретной системы
Определим показатели качества:
Статическая ошибка близка к нулю по истечении заданного времени Tp.
Время регулирования (при ошибке, равной 2%) равно 0,87 с.
Перерегулирование вовсе отсутствует, а время регулирования меньше заданного в 1с .Таким образом, можно сделать вывод о том, что оба из показателей качества удовлетворяют заданным. Отметим также, что в данном методе наблюдается наилучшие показатели качества и следовательно целесообразно осуществлять дискретизацию последовательного корректирующего звена методом введения квантователей и фиксаторов.
Заключение
В результате выполнения курсового проекта была исследована следящая система автоматического регулирования с сельсинным измерительным устройством. Выведены передаточные функции всех элементов входящих в систему. Полученная передаточная функция замкнутой системы до коррекции являлась неустойчивой. Методом ЛАЧХ синтезирован непрерывный корректирующий элемент первого порядка с отставанием по фазе. Скорректированная система обладает достаточным запасом устойчивости по фазе и амплитуде и обеспечивает заданные показатели качества.
Также в ходе выполнения курсового проекта был осуществлён переход от аналогового корректирующего элемента к дискретному. При этом подробно рассмотрены следующие методы дискретизации: трапеций, отображения нулей и полюсов, фиктивного квантователя и фиксатора. Для численного расчёта регулятора выбран метод фиктивных квантователя и фиксатора (фиксатор нулевого порядка), т.к. при дискретизации этим методом наблюдались наилучшие показатели качества. Выведена дискретная передаточная функция замкнутой системы. Полученная замкнутая система с дискретным устройством управления является устойчивой и удовлетворяет заданным показателям качества.