

Постановка задачи
Исследовать следующую систему с сельсинным измерительным устройством (рис.1) , ); в состав САУ входят сельсинное измерительное устройство СД и СТ (трансформаторный режим включения), фазовый детектор ФД, электромашинный усилитель мощности с поперечным полем ЭМУ, двигатель постоянного тока с независимым возбуждением ДПТ, редуктор РЕД и рабочая машина РМ.
Численные значения параметров элементов, образующих САУ, приведены в таблице. 1
Табл.1. Численные значения заданных параметров
|
Параметры |
Значения |
|
|
35; 1.0 |
|
Тм, с |
16.6* |
|
Tэ,с |
11.1* |
|
Тк, с |
6.66*10-3 |
|
Кред |
1/300 |
|
Кд, ред/Вс |
2.5 |
|
Кфд |
80 |
|
Кэму |
12 |
|
Кө, В/рад |
50 |
Анализ принципа действия сау и разработка функциональной схемы сау
В данном курсовом проектировании предполагается исследование следующей системы с сельсинным измерительным устройством, принципиальная схема системы которой приведена на рис.1.
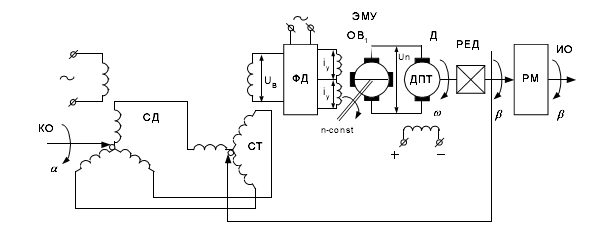
Рис. 1. Принципиальная схема следующей системы с сельсинным измерительным устройством
В состав САУ входят сельсинное измерительное устройство СД и СТ (трансформаторный режим включения), фазовый детектор ФД, электромашинный усилитель мощности с поперечным полем ЭМУ, двигатель постоянного тока с независимым возбуждением ДПТ, редуктор РЕД и рабочая машина РМ.
Рассмотрим принцип работы схемы. Алгоритм
функционирования заключается в следующем:
изменение управляемой величины с
необходимой точностью в соответствии
с заранее неизвестной функцией времени,
определяемой задающим воздействием:
![]() ,
где
,
где![]() -
заранее неизвестная функция времени.
Таким образом, следящая система, как и
программная система, воспроизводит
задающее воздействие. Однако это
-
заранее неизвестная функция времени.
Таким образом, следящая система, как и
программная система, воспроизводит
задающее воздействие. Однако это
 воздействие
в следящей системе изменяется не по
заданной программе, а произвольно.
воздействие
в следящей системе изменяется не по
заданной программе, а произвольно.
Сельсины в трансформаторном режиме
выполняют функцию элемента сравнения.
Ротор сельсина-датчика СД механически
связан с ведущим валом, а ротор
сельсина-приемника – с ведомым, или
приемным валом (с осью рабочего механизма).
Благодаря этому на сельсины как на
элемент сравнения поступают задающее
воздействие (угол
![]() поворота ведущего вала) и управляемая
величина (угол
поворота ведущего вала) и управляемая
величина (угол![]() поворота приемного вала). Сельсины
выставляют угол рассогласования
поворота приемного вала). Сельсины
выставляют угол рассогласования![]() между
ведущим и приемным валами и преобразуют
его в напряжение несущей частоты
между
ведущим и приемным валами и преобразуют
его в напряжение несущей частоты![]() ,
величина огибающей которой при малых
углах рассогласования пропорциональна
углу рассогласования, а фаза несущей
частоты определяется знаком этого угла.
Если угол рассогласования
,
величина огибающей которой при малых
углах рассогласования пропорциональна
углу рассогласования, а фаза несущей
частоты определяется знаком этого угла.
Если угол рассогласования![]() относительно согласованного положения
является положительным, то напряжение
несущей частоты совпадает по фазе с
напряжением питания
относительно согласованного положения
является положительным, то напряжение
несущей частоты совпадает по фазе с
напряжением питания![]() .
При отрицательном угле рассогласования
напряжение несущей частоты находится
в противофазе с напряжением питания
(рис.2).
.
При отрицательном угле рассогласования
напряжение несущей частоты находится
в противофазе с напряжением питания
(рис.2).
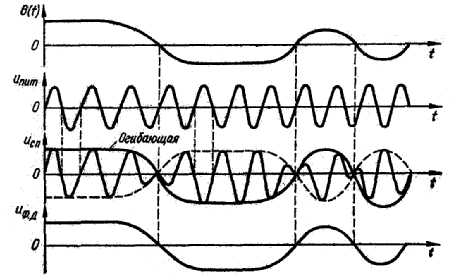
Рис.2. Характеристики, поясняющие работу элементов.
 Будем
считать, что положительное значение
огибающей модулированного напряжения
несущей частоты соответствует случаю,
когда напряжение несущей частоты
совпадает по фазе с напряжением питания,
а отрицательное значение огибающей –
случаю, когда напряжение несущей частоты
находится в противофазе с напряжением
питания. Тогда можно утверждать, что
сигнал рассогласования следящей системы
на выходе сельсина-приемника выражен
огибающей модулированного напряжения
несущей частоты (рис.2).
Будем
считать, что положительное значение
огибающей модулированного напряжения
несущей частоты соответствует случаю,
когда напряжение несущей частоты
совпадает по фазе с напряжением питания,
а отрицательное значение огибающей –
случаю, когда напряжение несущей частоты
находится в противофазе с напряжением
питания. Тогда можно утверждать, что
сигнал рассогласования следящей системы
на выходе сельсина-приемника выражен
огибающей модулированного напряжения
несущей частоты (рис.2).
Для усиления напряжения сигнала рассогласования в следящей системе применен электромашинный усилитель мощности ЭМУ, т.е. усилитель с входом на постоянном токе. ЭМУ с поперечным полем относится к усилительный элементам генераторного типа и представляет собой одноякорную электрическую мамину постоянного тока, в которой магнитный поток реакции якоря используется в качестве основного рабочего потока, а магнитный поток обмотки возбуждения служит управляющим потоком. Таким образом, изменяя ток возбуждения, можно менять в широких пределах величину выходной возможности, т.е. управлять процессом превращения механической энергии приводного двигателя в электрическую энергию, получаемую на выходе ЭМУ.
С выхода ЭМУ напряжение подается на исполнительный двигатель постоянного тока, который через редуктор связан с приемным валом и осью сельсина-приемника. На приемном вале находится собственно управляемый объект – рабочая машина. В следящей системе управляемым объектом является силовой исполнительный двигатель ДПТ. Собственно управляемый объект является нагрузкой для исполнительного двигателя и в состав самой системы не входит.
Имея принципиальную схему, составим функциональную схему. Следящую систему с сельсинным измерительным устройством целесообразно расчленить на следующие элементы : сельсинное
 измерительное
устройство (сельсин-датчик СД и
сельсин-трансформатор СТ); фазовый
детектор ФД; электромашинный усилитель
ЭМУ; исполнительный двигатель ДПТ;
редуктор РЕД; рабочий механизм РМ.
Функциональная схема данной САУ
представлена на рис.3.
измерительное
устройство (сельсин-датчик СД и
сельсин-трансформатор СТ); фазовый
детектор ФД; электромашинный усилитель
ЭМУ; исполнительный двигатель ДПТ;
редуктор РЕД; рабочий механизм РМ.
Функциональная схема данной САУ
представлена на рис.3.
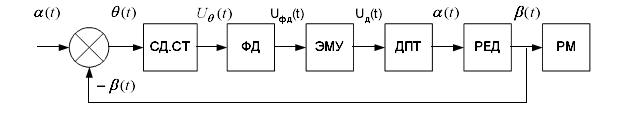
Рис. 3. Функциональная схема САУ
На функциональной схеме (рис2) приведены следующие элементы:
СД. СT-сельсинное измерительное устройство
ФД - фазовый детектор
ЭМУ - электромашинный усилитель
ДПТ - исполнительный двигатель
РЕД – редуктор
РМ - рабочий механизм
![]() - угол поворота ведущего вала
- угол поворота ведущего вала
![]() - угол поворота ведомого вала
- угол поворота ведомого вала
![]() - угол рассогласования ведущего и
ведомого валов
- угол рассогласования ведущего и
ведомого валов