

Расчет корректирующего звена методом лачх
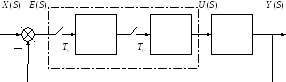
Задача синтеза корректирующего устройства заключается в расчете такой передаточной функции Wку(s) , чтобы заданная системаW(s), соединённая последовательно с корректирующим устройством и охваченная обратной связью (рис.8.), обладала требуемым качеством.
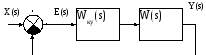
Рис. 8. Структурная схема непрерывной САУ при коррекции
Частоты сопряжения располагаемой системы:
![]()
![]() ;
;
По заданным показателям качества Tp=1cσ = 35% определим, что
![]()
![]() с-1.
с-1.
Запас устойчивости по амплитуде L1 = 10,5Дб, по фазеθ = 40°.
Построим ЛАЧХ и ЛФЧХ разомкнутой нескорректированной системы (рис.9)
Теперь построим ЛАЧХ желаемой системы
(рис.9), через точку (![]() ,0)
проводим прямую с наклоном –20Дб, со
стороны низкочастотной области её
излом будет на частоте ω2ж=2,87с-1,в
высокочастотной–на частоте ω3ж=
ω1p=73,67с-1.
,0)
проводим прямую с наклоном –20Дб, со
стороны низкочастотной области её
излом будет на частоте ω2ж=2,87с-1,в
высокочастотной–на частоте ω3ж=
ω1p=73,67с-1.
 Для
построения желаемой ЛАЧХ в низкочастотной
области необходимо учесть максимально
допустимую ошибку слежения Хmaxпри условии, что входной сигнал может
изменяться с максимальной угловой
скоростью ω maxи с максимальным
угловым ускорением εmax . Для выполнения
этих требований необходимо, чтобы
желаемая ЛАЧХ не попадала бы в запретную
область.
Для
построения желаемой ЛАЧХ в низкочастотной
области необходимо учесть максимально
допустимую ошибку слежения Хmaxпри условии, что входной сигнал может
изменяться с максимальной угловой
скоростью ω maxи с максимальным
угловым ускорением εmax . Для выполнения
этих требований необходимо, чтобы
желаемая ЛАЧХ не попадала бы в запретную
область.
Требуемый коэффициент усиления Kc=ώ0max/Xmax=2.0/0.02=100 ,LA2=20Lg(KC)=40.
Запретная область проходит через точку В с координатами LB=20Lg(ώ0max2/έ0maxXmax)=67,9 Дб, и ώB=έ0max/ ώ0max=0,04 с-1.
Прямая с наклоном -20Дб, проведённая
через точку ω=1с-1,![]() попадает в запретную область, поэтому
необходимо увеличить коэффициент
усиления желаемой системы. Выберем
попадает в запретную область, поэтому
необходимо увеличить коэффициент
усиления желаемой системы. Выберем![]() =
150, отсюда сразу получаем частоту
ω1ж=0,176 с-1, на которой
происходит первый излом желаемой ЛАЧХ
и частоту ω2ж=2,87с-1, на которой
происходит второй излом.
=
150, отсюда сразу получаем частоту
ω1ж=0,176 с-1, на которой
происходит первый излом желаемой ЛАЧХ
и частоту ω2ж=2,87с-1, на которой
происходит второй излом.
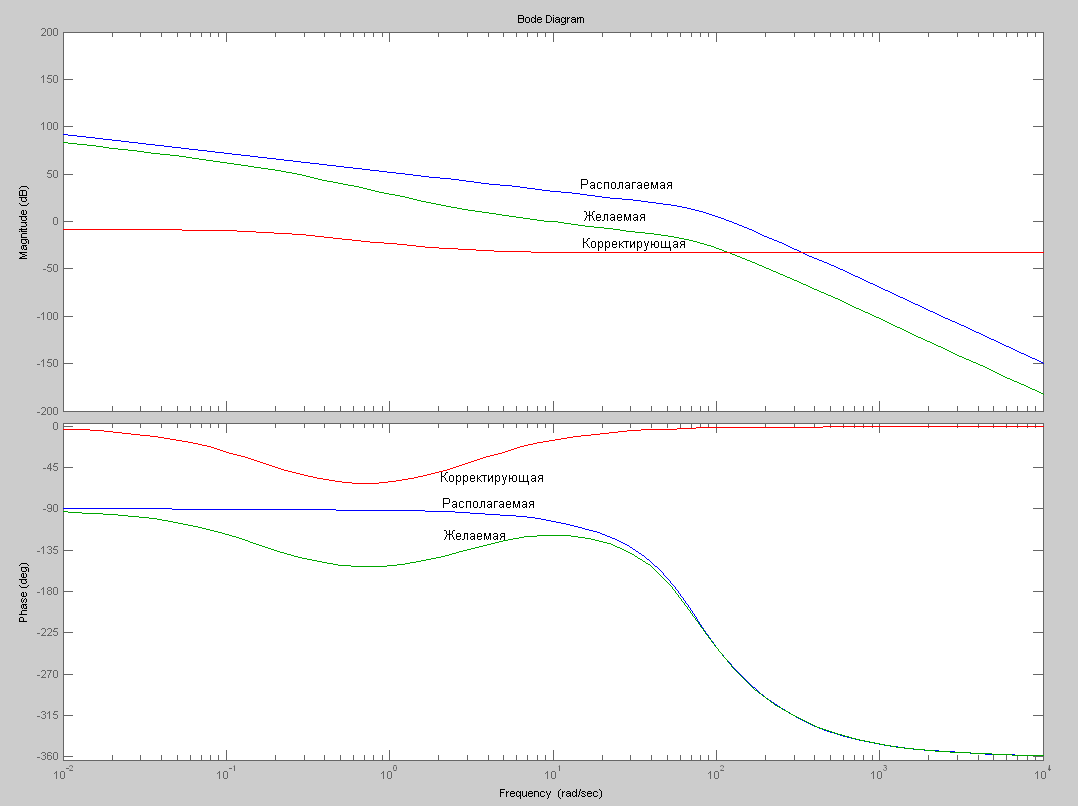
Рис.9. ЛАЧХ и ЛФЧХ располагаемой системы, желаемой системы и корректирующего элемента
 Вычитая
из ЛАЧХ желаемой ЛАЧХ располагаемой
системы, получаем ЛАЧХ корректирующего
элемента (рис.9), передаточная функция
которого имеет вид
Вычитая
из ЛАЧХ желаемой ЛАЧХ располагаемой
системы, получаем ЛАЧХ корректирующего
элемента (рис.9), передаточная функция
которого имеет вид
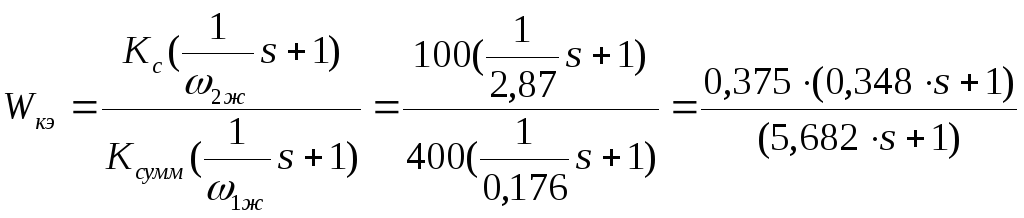 корректирующий элемент с отставанием
по фазе.
корректирующий элемент с отставанием
по фазе.
Таким образом, получим ЛАЧХ и ЛФЧХ замкнутой системы после проведения коррекции (рис.10).
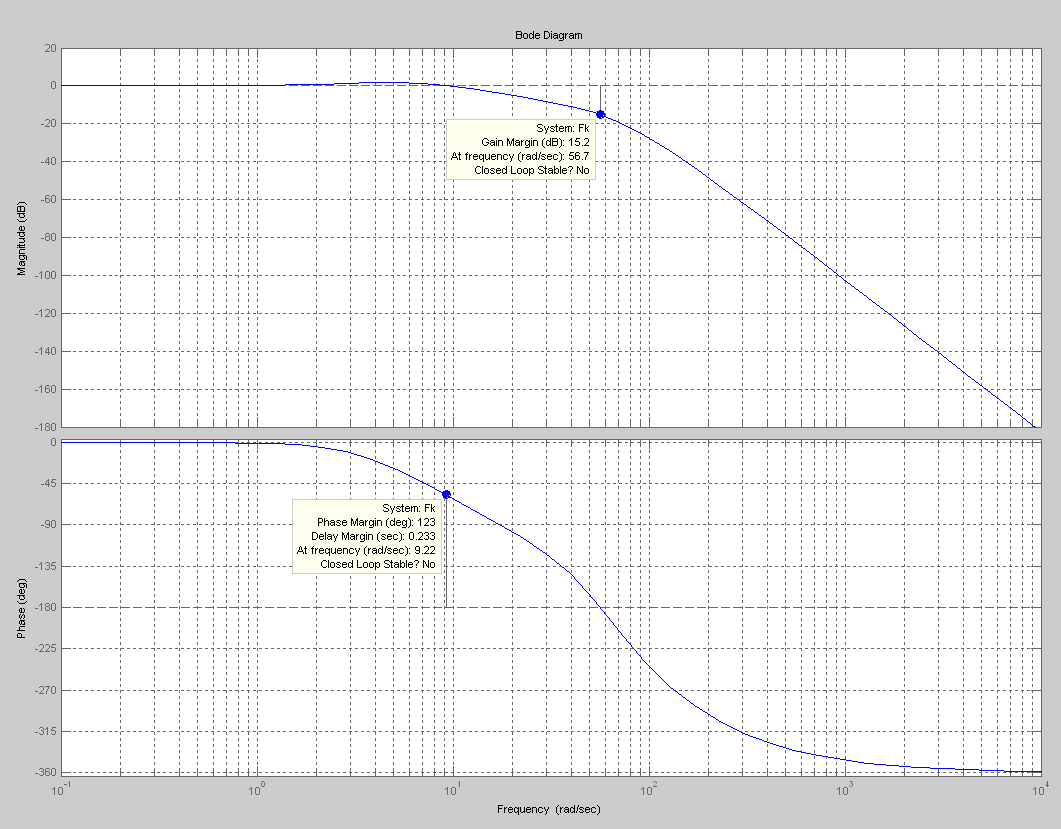
Рис.10. ЛАЧХ и ЛФЧХ замкнутой системы после коррекции
Запас устойчивости скорректированной системы по амплитуде составляет Lзап=15.2 Дб ,а по фазе – φзап= 123° .
Анализ системы с непрерывным корректирующим звеном
Переходная характеристика скорректированной представлена на рис. 11.
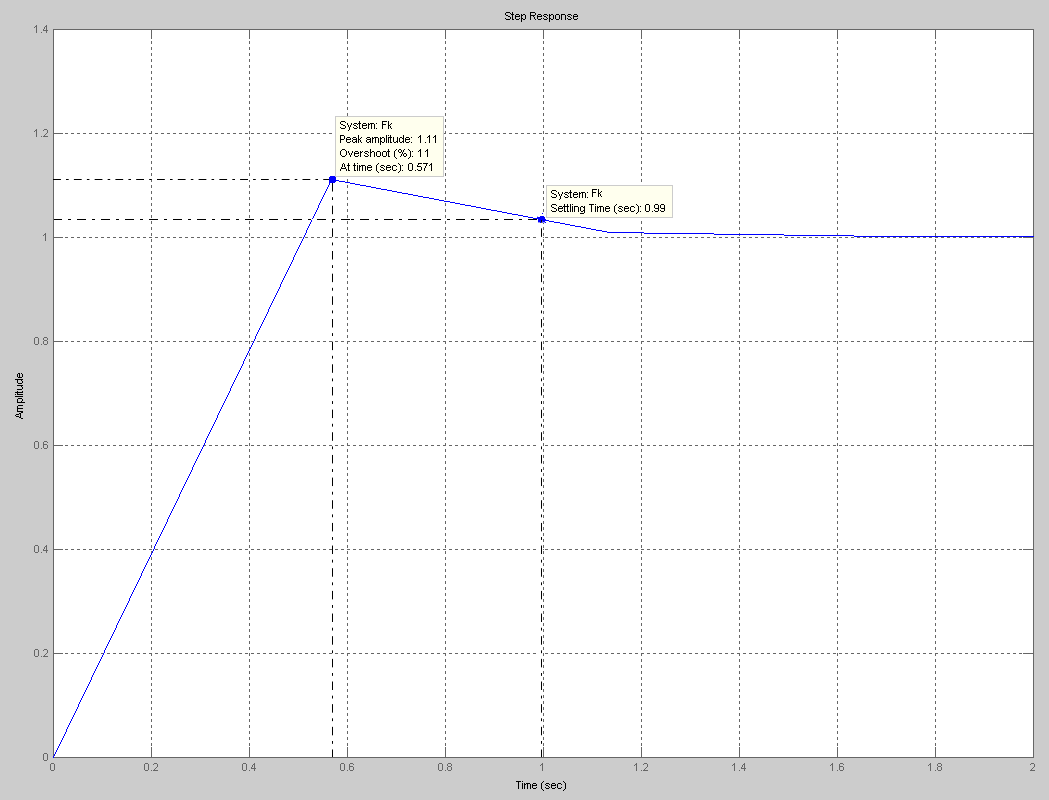
Рис. 11. Переходный процесс замкнутой скорректированной системы.
Перерегулирование скорректированной системы составляет
![]()
Статическая ошибка близка к нулю по истечении заданного времени Tp.
Время регулирования (при ошибке, равной 2%) равно 0,99 с.
Перерегулирование меньше заданного в 35 %, а время регулирования чуть лучше заданного в 1с .
Таким образом, можно сделать вывод о том, что оба из показателей качества не превышают заданных.
Дискретизация последовательного корректирующего звена методом аппроксимации операции интегрирования, получение передаточной функции цифровой сау и анализ устойчивости системы
В данном пункте курсового проектирования необходимо исследовать САУ с цифровым устройством управления. В данном случае САУ переходит в разряд дискретных, поскольку функции коррекции динамики системы возлагаются на цифровое вычислительное устройство (микроконтроллер), который реализует алгоритм управления.
Отметим, что структурная схема САУ с цифровым устройством управления будет иметь вид, представленный на рис.12.
микроконтроллер
Рис.12. Структурная схема САУ с цифровым устройством управления
Если ЦАП обладает свойствами фиксатора нулевого порядка, то дискретная передаточная функция системы может быть получена, следующим образом:
![]() ,
,
где
![]() ,Z-
преобразование
,Z-
преобразование ![]() можно вычислить
либо
можно вычислить
либо
 при
помощи правила вычетов, либо разложив
выражение на простые дроби и воспользовавшись
таблицей элементарных Z-преобразований.
при
помощи правила вычетов, либо разложив
выражение на простые дроби и воспользовавшись
таблицей элементарных Z-преобразований.
Для получения дискретной передаточной
функции корректирующего звена
![]() по его непрерывной передаточной функции
по его непрерывной передаточной функции![]() рекомендуется воспользоваться билинейным
преобразованием, аппроксимирующим
операцию интегрирования, что соответствует
численной аппроксимации операции
интегрирования по методу трапеций.
рекомендуется воспользоваться билинейным
преобразованием, аппроксимирующим
операцию интегрирования, что соответствует
численной аппроксимации операции
интегрирования по методу трапеций.
Рассмотрим определение дискретной передаточной функции последовательного корректирующего звена.
Передаточная функция корректирующего звена представлена в виде:
![]() ,
,
где Кку=0,375,T1=5,682,T2=0,348
Существуют различные методы определения дискретной передаточной функции, рассмотрим некоторые из них:
Метод правых прямоугольников:
![]() ,
,
![]() .
.
Метод левых прямоугольников
![]() ,
,
![]() .
.
Метод трапеций:
![]() ,
,
![]() .
.
 Метод
отображения нулей и полюсов:
Метод
отображения нулей и полюсов:
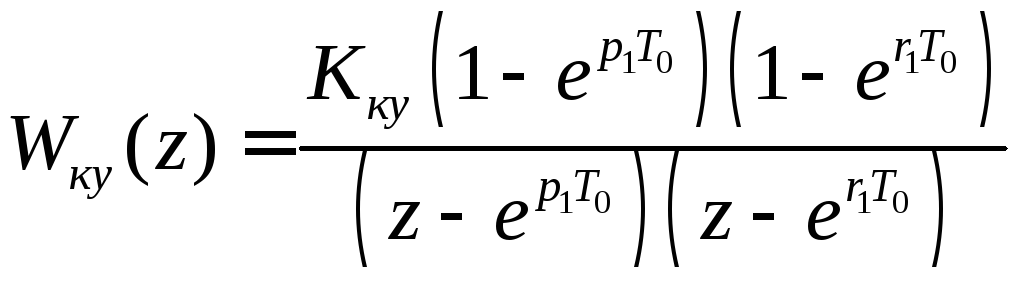
Передаточная функция корректирующего элемента имеет один нуль равный r1=-2,8736 и один полюс равныйp1=-0,176.
Передаточная функция в z-области имеет вид
 ,
,
K* определим из условия
![]() или
или
 ,
,
![]() ,
,
 .
.
Метод введения фиктивных фиксаторов и квантователей:
Применим фиксатор нулевого порядка.

Рассмотрим получение дискретной передаточной функции цифровой САУ и анализ устойчивости системы.
Передаточная функция цифровой САУ имеет
вид
![]() .
.
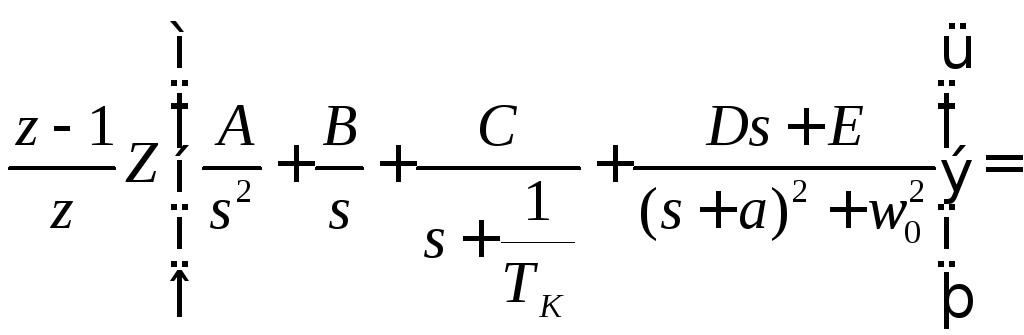
Для непрерывной части передаточная
функция в области zможет
быть представлена в виде:![]() (ЦАП – фиксатор нулевого уровня)
(ЦАП – фиксатор нулевого уровня)
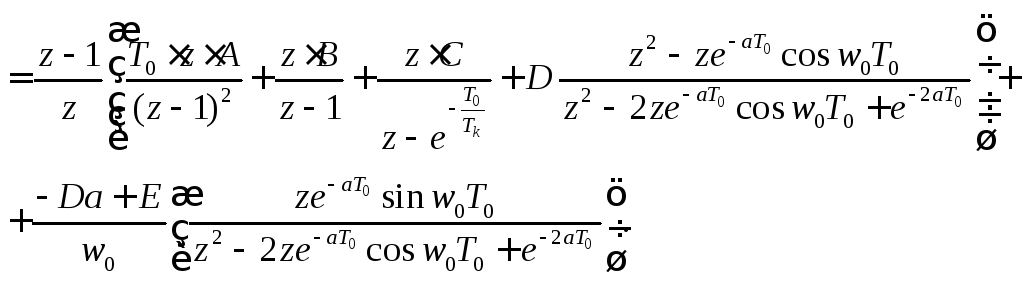
 Отсюда
получаем:
Отсюда
получаем:
![]() ,
,
![]()
 =
=

Зададимся временем дискретизации T0 = 0.005c, после подстановки численных значений получим:
Для корректирующего устройства (по методу трапеций)
![]()
![]()
Для разомкнутой нескорректированной системы:
A=400
B=-9,304
C=1,0005714
D=8,3034286
E=498,3091129
a=45,0452169
 w0=73,361362
w0=73,361362
![]()
Откуда получаем дискретную передаточную функцию замкнутой сиcтемы
![]()
Проверим на устойчивость полученную дискретную систему.
Полюса дискретной передаточной функции следующие:
z1= 0.738+ 0.279i,
z2= 0.738- 0.279i,
z3= 0.975,
z4= 0.955+ 0.034i,
z5= 0.955- 0.034i.
Все они попадают в область, ограниченную единичной окружностью на z-плоскости, поэтому дискретная система устойчива.