

Введение
Автоматическое регулирование представляет собой наиболее эффективный принцип автоматики при частичной автоматизации, когда технические средства автоматики осуществляют лишь простые функции управления, связанные с измерением, анализом, контролем различных физических величин и отработкой решений, принятых оператором в виде установок, программ или других сигналов управления.
Современные системы управления сложными объектами промышленной технологии строятся по иерархическому принципу. Это значит, что система управления такими объектами расчленяется на ряд систем, стоящие на разных уровнях подчинения. Система более высокого ранга, ориентируясь на общий (глобальный) критерий управления, выдает команды на включение или отключение отдельных локальных объектов, а также осуществляет выбор частных критериев управления этими объектами. Локальные системы управления осуществляют поддержание заданных оптимальных режимов как в пусковых, так и в нормальных эксплуатационных условиях. Являясь нижним иерархическим уровнем автоматических систем управления промышленными объектами локальные системы осуществляют функции измерения, контроля и регулирования основных технологических параметров, характеризующих состояние технологического процесса. Количество регулируемых параметров в отдельно взятой локальной системе управления невелико и составляет один или два параметра. Из общего числа систем управления современным производством локальные системы составляют около 80%. Качество работы локальных систем управления во многом определяет стабильность и качество выходного продукта, а следовательно и рентабельность производства.
1 Исследование линейной части сАУ
1.1 Описание функционально- принципиальной схемы САУ
Н
7
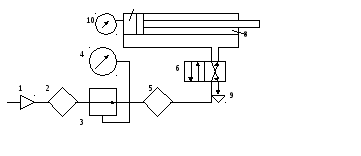
Рисунок 1- Схема пневматического привода с возвратно-поступательным движением поршня
Сжатый воздух от источника питания 1 через фильтр - влагоотделитель 2, редукционный клапан 3и маслораспылитель 5 поступает на вход пневмораспределителя 6. давление воздуха контролируется манометром 4. выхода пневмораспределителя связаны с полостями 7 и 8 пневмоцилиндра.
В положении на схеме полость 8 находится под давлением, а полость 7 сообщена с выходом 9 в атмосферу. Поршень пневмоцилиндра занимает крайнее правое положение. Переключение пневмораспределителя происходит за счет работы датчика контакта 10, который при достижении поршнем крайнего правого положения посылает соответствующий сигнал на пневмораспределитель и переключает его в противоположное положение.
1.2 Функциональная схема сау
На основе имеющейся функционально-принципиальной схемы построим
функциональную схему.
Функциональная схема – это схема, состоящая из функциональных элементов, которые показывают их функциональное назначение при автоматическом управлении технологическим процессом и связь между ними.
Электрический
манометр



Клапан гидроцилиндр распределитель








Датчик
контакта


Где x(t) – входная величина – давление жидкости в системе,
у(t) – выходная величина – изменение положения поршня,
P1(t) – давление воздуха в системе, задаваемое клапаном,
U1(t) – электрический сигнал, передаваемый на распределитель при срабатывании датчика контакта,
Х(t) – перемещение поршня гидроцилиндра,
P2(t) – давление воздуха на входе гидроцилиндра,
U2(t) – электрический сигнал, передаваемый на клапан при необходимости увеличить давление системы,
Pпост – постоянное давление, задаваемое компрессором
Рисунок 2 - Функциональная схема