

7.1.2. Структурная схема данной автоматической системы регулирования
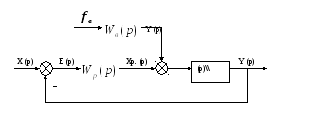
Рис. 7.3.
![]()
![]() -передаточная
функция объекта
-передаточная
функция объекта
![]() -
передаточная функция канала возмущающего
воздействия
-
передаточная функция канала возмущающего
воздействия
![]() -передаточная
функция канала регулирующего воздействия
(для ПИД-регулирования, а для П -, И- и ПИ-
регулирования –частные случаи из этого
выражения).
-передаточная
функция канала регулирующего воздействия
(для ПИД-регулирования, а для П -, И- и ПИ-
регулирования –частные случаи из этого
выражения).
7.2. Определение параметров передаточной функции объекта регулирования по экспериментальной переходной функции методом “площадей”
Построение математической модели линейной системы по экспериментальной переходной функции производится в следующем порядке:
На основании формы переходной функции и в зависимости от физических свойств исследуемой системы устанавливается вид передаточной функции модели;
Определяются значения коэффициентов передаточной функции из условия наилучшего приближения модели и объекта;
Производится оценка точности аппроксимации:
Рассмотрим метод площадей:
Рассмотрим функцию h(t), которая получена из экспериментальной переходной функции объекта путем исключения чистого запаздывания и нормировки. Пусть h(0)=h’(0)=0.
При аппроксимации функции h(t) на практике обычно задаются следующими структурами передаточной ф. модели:
![]()
(1.1)
![]()
(1.2)
![]()
(1.3)
В
![]()
обратное передаточной функции можно разложить в ряд по степеням p:
![]()
Очевидно, что для модели 1.1: a1=S1; a2=S2; a3=S3;
для модели 1.2: a1=S1; a2=S2; a3=S3;
для модели 1.3: коэффициенты b1 , a1 , … ,bi , ai где i=1,2,3 связаны с коэффициентами Si разложения 1.4 системой уравнений:
|
a1=b1+S1 ; |
a3=b1S2+S3 ; |
|
|
(1.5) |
|
a2=b1S1+S2 ; |
0=b1S3+S4 ; |
Для определения Si воспользуемся связью между S и некоторыми функциями от (1-h). Величину L(1-h) можно представить так:
![]()
![]()
Отсюда:
и
![]()
(1.6)
Разложим функцию e-pt в ряд по степеням pt:
![]()
(1.7)
Подставив
этот ряд в уравнение (1.6), получим с учетом
формулы (1.4) выражение:
![]()
![]() (1.8)
(1.8)
Из выражения (1.8) следует, что коэффициенты Si связаны с переходной функцией h(t) соотношением:
![]()
![]()
![]()
![]()
М
![]()
(1.9)
тогда: S1 = M0 ;
S2 = S1 М0 - M1 = S12 – M1;
S3 = S2 М0 – S1 M1 + (1/2)* M2 ;
S4 = S3 М0 - S2 M1 + (1/2)*S1 M2 – (1/6)*M3 ;
Определив по графику h(t) значения Mi методом численного интегрирования и вычислив из соотношений величины “площадей” Si , определяют значения коэффициентов передаточной функции.
Выбор вида передаточной функции модели производится из следующих соображений, если коэффициенты S1 , S2 , S3 положительны, то в зависимости от вида функции h(t) задаются моделью (1.1) или (1.2), если хоть один из коэффициентов S1 , S2 , S3 отрицателен, задаются моделью (1.3).
В соответствии с выше изложенной методикой определяем коэффициенты передаточной функции по программе 1 (KP1.PAS – далее KP1), выбрав шаг дискретизации t=1 и произведя нормировку в соответствии с формулой:
![]()
График экспериментальных значений (кривая разгона)
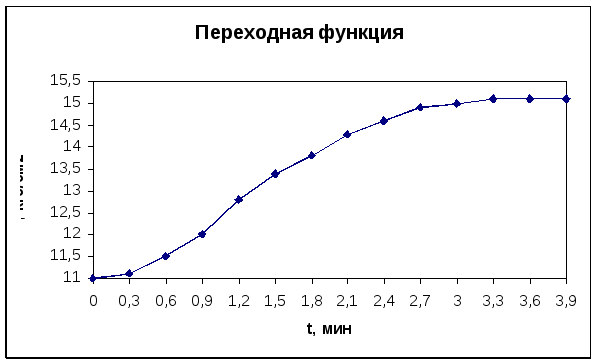
Рис. 7.4.
Приведение кривой разгона к нормированному, то есть безразмерному виду осуществляется с помощью формулы:
![]()
Таблица 7.2.
|
P, (нормирован-ные значения) |
P1 |
P2 |
P3 |
P4 |
P5 |
P6 |
P7 |
|
0 |
0,02439 |
0,121951 |
0,243902 |
0,439024 |
0,585366 |
0,682927 | |
|
P8 |
P9 |
P10 |
P11 |
P12 |
P13 |
P14 | |
|
0,804878 |
0,878049 |
0,95122 |
0,97561 |
1
|
1
|
1 |

Рис. 7.5.
![]() (общий
вид передаточной функции, так как
коэффициенты
(общий
вид передаточной функции, так как
коэффициенты
![]() положительны)
положительны)
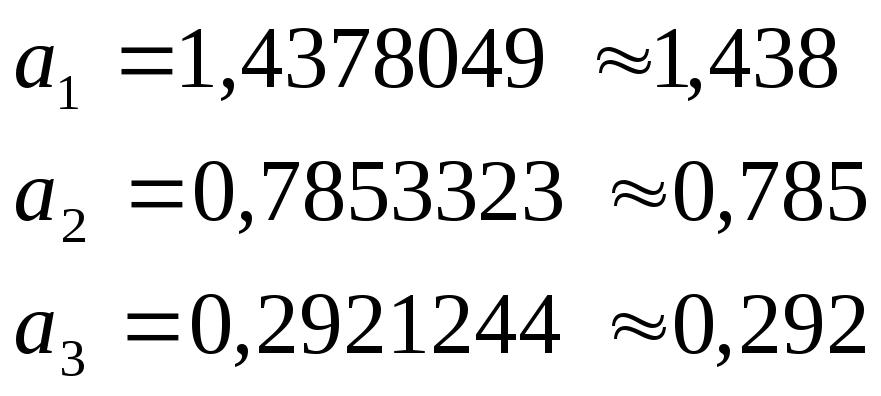
Используя программу кп-1 получаем следующие значения:
![]()