

1. Определение периода квантования т из теоремы Котельникова


сделаем замену
![]()
получим уравнение
![]() ,
корни которого
,
корни которого
![]()
так как один корень отрицательный, то
![]() и
и![]() .
.
![]()
![]()
находим период квантования
![]()
![]()
Для того чтобы в дальнейшем при получении Z-передаточной функции дискретного объекта регулирования можно было использовать обычное (а не модифицированное) Z– преобразование, следует выбирать время запаздывания непрерывного объекта так, чтобы это время было бы равно целому числу периодов квантования. Поэтому я изменил время запаздывания с 3 до 2.4 минут.
2. Получение Z-передаточной функции объекта управление
![]()
![]()
![]()
Разложим выражение в фигурных скобках на элементарные дроби через вычеты
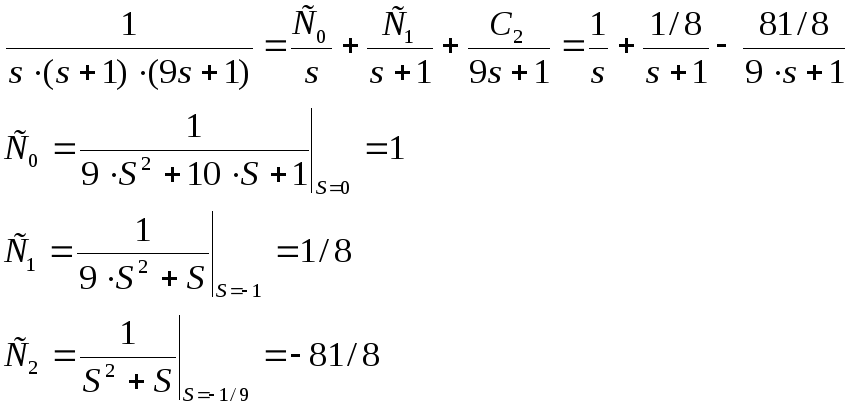
по таблице находим Z-преобразование каждой дроби
![]()
В итоге, получим Z-передаточную функцию объекта вида
![]()
после преобразований и подстановки времени квантования
![]()
Проверка:
![]()
3. Получение разностного уравнения объекта регулирования и построение временных характеристик в аналоговой и дискретной форме
3.1 Получение разностного уравнения объекта регулирования
![]()
![]()
![]()
![]()
Получаем разностное уравнение объекта:
![]()
3.2 Временные характеристики непрерывного и дискретного объекта
![]()
Временная характеристика непрерывного объекта:
![]()
![]()
Временная характеристика дискретного объекта регулирования получается из разностного уравнения заменой [kT] на дискретную единичную функцию 1[kT]:
![]()
Графики временных функций непрерывного и дискретного объектов – см. приложение График 1.
4. Получение комплексного коэффициента передачи объекта управления, построение и сравнение КЧХ непрерывного и дискретного ОУ
Получение комплексного коэффициента передачи непрерывного ОУ:
![]()
Заменим
![]() ,
получаем
,
получаем
![]()
Получение комплексного коэффициента передачи дискретного ОУ:
![]()
Заменим
![]() ,
то получаем
,
то получаем

Графики КЧХ непрерывного и дискретного ОУ – см. приложение График 2.
Сравнив характеристики непрерывного и дискретного объектов регулирования, можно сделать вывод о том, что КЧХ дискретного объекта опережает по фазе КЧХ непрерывного объекта на угол ∆φ, а по модулю КЧХ получились равными.
5. Расчет оптимальных параметров настройки непрерывного и дискретного ПИ-регуляторов
5.1. Расчет оптимальных параметров настройки непрерывного ПИ-регулятора
Для расчета оптимальных параметров настройки непрерывного ПИ-регулятора воспользуемся методом Ротача В.Я. при ограничении на частотный показатель колебательности.
=0,75 - степень затухания
M=2,3765 - частотный показатель колебательности
![]() - комплексный коэффициент
передачи непрерывного ОУ
- комплексный коэффициент
передачи непрерывного ОУ
![]() - комплексный коэффициент передачи
непрерывного ПИ-регулятора
- комплексный коэффициент передачи
непрерывного ПИ-регулятора
Для нахождения оптимальных настроек непрерывного ПИ-регулятора используем построение на миллиметровой бумаге (см. приложение График 3), в котором:
![]()
![]() -
комплексный коэффициент передачи
разомкнутой системы для построения
семейства КЧХ при Кп=1 и заданном Ти.
-
комплексный коэффициент передачи
разомкнутой системы для построения
семейства КЧХ при Кп=1 и заданном Ти.
![]() - формула для нахождения Кп, гдеu– значения по модулю координат центров
получившихся окружностей, при заданных
Ти.
- формула для нахождения Кп, гдеu– значения по модулю координат центров
получившихся окружностей, при заданных
Ти.
Таблица 1
-
u
0,081
0,092
0,117
0,158
Ти
10
7
5,12
4
Кп
15
13,21
10,39
7,69
По графику зависимости Кп/Ти от Кп (см. приложение График 4) видно, что оптимальными параметрами настройки являются Кп=10,39, а Ти=5,12.