

курсовая работа / Лабораторный комплекс / 3
.DOC3. Выбор метода построения. Разработка обобщенной и полной структурной схемы АОЭП
В реальных системах не всегда представляется возможность заранее предусмотреть внешние влияния, поэтому современные системы управления требуют все более новые подходы. Так известна идея использования частотного разделения каналов управления и самонастройки. В них разделение каналов осуществлялось путем включения избирательного фильтра в контур адаптации. Целью самонастройки было обеспечение постоянства произведения коэффициентов усиления пропорционального регулятора и объекта управления. Такой подход не позволяет контролировать изменение других параметров объекта настраивать ПИ и ПИД - регуляторы, а также регуляторы более сложной структуры. В связи с этим в работе Мазурова В.М. предлагается новый принцип построения адаптивных систем использующий частотное разделение каналов управления и самонастройки. В основу этого принципа в отличии от ранее известных подходов положены следующие идеи:
1) Частотное разделение каналов управления и самонастройки осуществляется путем включения точно настроенного цифрового заграждающего фильтра в главный контур системы что позволяет исключить искажающее влияние регулятора на гармоническую составляющую выходного сигнала объекта на частоте пробных колебаний подаваемых на его вход и обеспечить однозначное определение критической частоты объекта;
2) В качестве пробного сигнала выбран гармонический сигнал содержащий одну или несколько периодических составляющих формируемых высокоточным цифровым генератором. Такой сигнал несмотря на ограниченную информационную емкость позволяет оптимально настраивать типовые регуляторы и в то же время обеспечивает высокую помехоустойчивость контура адаптации за счет знания точного значения текущей частоты пробного сигнала;
3) Использование высокочувствительного и помехоустойчивого метода синхронного детектирования для определения параметров критических колебаний позволяет резко уменьшить амплитуду пробного сигнала устойчиво оценивать параметры при наличии шумов и тем самым повысить надежность работы адаптивного регулятора в промышленных условиях;
4) Определение параметров критических колебаний объекта или разомкнутой системы позволяет использовать эффективные и проверенные на практике методы Циглера - Никольса и В.Я.Ротача для расчета настроек ПИД - регуляторов.
Одним из новых направлений построения адаптивных регуляторов является использование в них цифровой модели объекта, параметры которой определяются с помощью блока идентификации. По текущим оценкам этих параметров производится расчет настроек типовых ПИ или ПИД - регуляторов либо расчет коэффициентов регулятора состояния.
Идея построения, основанная на включении режекторного ( заграждающего) фильтра в замкнутый контур системы, настроенного на частоту пробных колебаний, подаваемых в систему с помощью двух цифровых генераторов позволяет проводить расчёт настроек по частоте критических колебаний разомкнутой системы, либо на частоте, близкой к резонансной частоте замкнутой системы. Включение заграждающего фильтра в большинстве случаев позволяет системе сохранить работоспособность, увеличивая, однако, колебательность переходных процессов в ней, при этом тестирующая или пробная гармоника не участвуя в процессах формирования динамики основного контура регулирования может использоваться в контуре самонастройки. Экспериментально установлено, что использование заграждающих фильтров выше второго порядка не рационально, так как пропорционально увеличиваются фазовые сдвиги вносимые этими фильтрами в систему уравнений, это может привести к появлению неустойчивых режимов работы.
При разработке структурной схемы автоматизации технологических процессов необходимо решить следующие задачи:
-
получение первичной информации о состоянии технологического процесса и оборудования;
-
непосредственное воздействие на технологический процесс для управления им;
-
стабилизация технологических параметров процесса;
-
контроль и регистрация параметров процессов и состояние технологического оборудования.
Эти задачи решаются на основании анализа условий работы технологического оборудования, критериев и законов управления объектом, а также требований предъявляемых к точности стабилизации, контролю и регистрации технологических параметров, к качеству регулированию и надежности.
В структуре разрабатываемой САУ можно выделить четыре основных части:
-
ПИ - регулятор ;
-
ЗФ - заграждающий фильтр;
-
ОУ - объект управления;
-
КСН - контур самонастройки.
Обобщенная структурная схема АОЭП представлена на рис.1 .
Обобщенная структурная схема
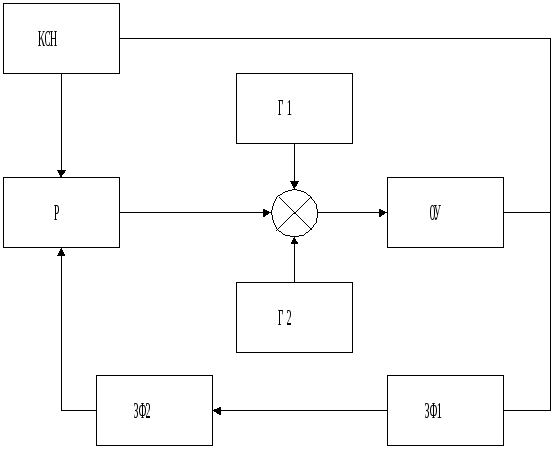
Рисунок 1
Рассмотрим контур управления системы. В него входят:
-
объект управления;
-
заграждающий фильтр;
-
ПИ - регулятор.
ПИ - регулятор имеет следующую передаточную функцию:
![]() (3.1.)
(3.1.)
где d0,d1 - коэффициенты: d0 = -2 / Тi ; d1 = -1;
Ti - нормированное значение постоянной времени интегрирования: Ti = Tи / Tк;
Tи - реальное значение постоянной времени интегрирования;
Кр - коэффициент усиления .
Структурная схема ПИ - регулятора
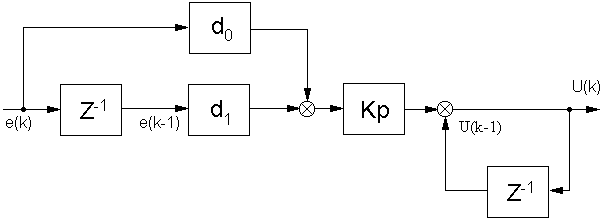
Рисунок 3.1
Передаточная функция заграждающего фильтра имеет вид:
![]() (3.2.)
(3.2.)
Df - добротность заграждающего фильтра;
N - нормированный период;
Z -
комплексная
переменная:
![]() .
.
а, b, с - коэффициенты ЗФ, расчет которых ведется по формулам рассмотренных в следующих пунктах.
Принцип работы заграждающего фильтра

Рисунок 3.2
Добротность фильтра
Дf
=
![]() (Рис.
3.2), выбирается в диапазоне - 2¸10.
(Рис.
3.2), выбирается в диапазоне - 2¸10.
Структурная схема заграждающего фильтра
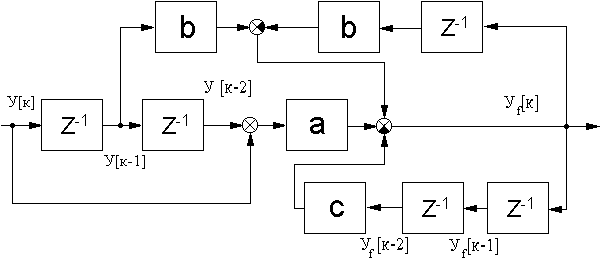
Рисунок 3.3
Самонастройка системы ведется с помощью контура адаптации. Работа основных блоков контура будет рассмотрено ниже.
Рассмотрим как влияет заграждающий фильтр на ЛАХ объекта(рис.3.4.), в качестве примера возьмём апериодическое звено первого порядка с запаздыванием
![]() ,
k=1 .
,
k=1 .
Влияние заграждающего фильтра на ЛАХ объекта

Рисунок 3.4
Из графиков видно,
что критическая частота объекта и
заграждающего фильтра
![]() смещается влево, что приводит к некоторому
увеличению колебательности переходных
процессов в замкнутой системе с
заграждающим фильтром.
смещается влево, что приводит к некоторому
увеличению колебательности переходных
процессов в замкнутой системе с
заграждающим фильтром.
Восстановить прежние запасы устойчивости можно, если несколько скорректировать формулы для расчёта параметров ПИ- регулятора. В реальных условиях включение контура адаптации может производиться с различной периодичностью.
-
Для стационарных объектов достаточно произвести однократную настройку системы с последующим выключением, как контура самонастройки, так и заграждающего фильтра из системы. Одновременно выключается генератор.
-
Для квазистационарных объектов необходимо периодически включать контур самонастройки, периодичность включения определяется скоростью дрейфа параметров объекта.
-
Для нестационарных объектов необходима непрерывная работа контура адаптации и расчёт настроек регулятора по скоростным формулам Циглера- Никольса.
Величина добротности Дf заграждающего фильтра выбирается в диапазоне Дf = 2¸ 10. Причём чем больше Дf , тем меньше влияние заграждающего фильтра на динамику системы, но при этом уменьшается скорость затухания пробной составляющей в заграждающем фильтре, что приводит к увеличению времени самонастройки системы. Главным достоинством такого подхода является высокое быстродействие процессов самонастройки. Однако точность (оптимальность) полученных настроек не гарантируется, это связано с тем, что формулы носят эмпирический характер и рассчитаны на объекты с отношением t / Т от 0 до 0.3. С увеличением отношения t/Т точность настроек падает.
Синхронный детектор предназначен для определения текущих значений амплитуды и фазы гармонической составляющей в выходном сигнале объекта .
Фильтр низких частот применяется для сглаживания случайных бросков амплитуды и фазы.
Регулятор Кр изменяет величину коэффициента усиления регулятора таким образом, чтобы обеспечить необходимую длину вектора разомкнутой системы.
Объект управления может быть представлен любым видом передаточных функций.
Высокое качество настройки ПИ- регулятора будет гарантировано, если разомкнутая система имеет заданные запасы по амплитуде и фазе, независимо от динамических свойств объекта управления.
Представим полную структурную схему для АОЭП.
Структурная схема АОЭП
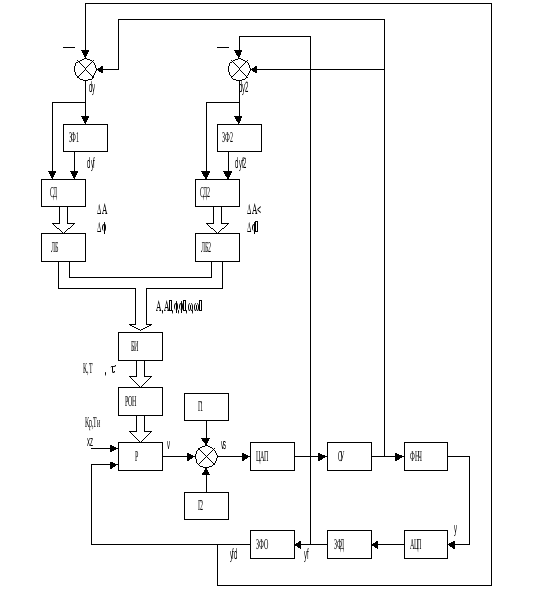
Рисунок 3.5
где
Р- ПИ - регулятор;
Г1,Г2 - цифровые генераторы синусоидальных колебаний. Они являются перенастраиваемыми по частоте(по нормированному периоду колебаний и амплитуде генератора), причем амплитуда колебаний выбирается таким образом, чтобы амплитуда колебаний выхода достаточно четко измерялась синхронным детектором на фоне шумов;
ОУ - объект управления, который может быть представлен любым видом передаточных функций;
ЗФ1,ЗФ2 - с их помощью, включенных по схеме вилки, обеспечиваются избирательные выделения нужной гармоники из сигнала dy и dy2 ;
СД,СД2 - предназначены для определения текущих значений амплитуды и фазы ;
ФНЧ - сглаживает шумы с коллектора тахогенератора ;
ЛБ1,ЛБ2 - логические блоки определяют момент достижения установившихся значений амплитуд и фаз колебаний выходного сигнала.
Кратко опишем общий принцип работы системы :
На вход объекта (рис3.5) подается сумма двух пробных гармонических сигналов U1+U2 с частотами w и 2w. В отрицательную обратную связь системы включаются два последовательно соединенных заграждающих фильтра, которые не пропускают соответственно две частоты пробных колебаний на вход регулятора. Блоки синхронного детектирования оценивают значения амплитуд и фаз при двух значениях частотах w1 и w2.Необходимость одновременной оценки амплитуд и фаз на двух частотах объясняется задачей повышения быстродействия системы. Блок идентификации осуществляет расчет коэффициента усиления, постоянной времени и запаздывания математической модели объекта, поступающих в блок расчета оптимальных настроек. Блок расчета оптимальных настроек осуществляет расчет оптимальных настроек ПИ-регулятора.