

курсовая работа / Лабораторный комплекс / 2
.DOC




2. Обзор литературы по адаптивно- оптимальным системам
Немало статей по вопросам адаптации публиковалось и в 1958—1968 гг. Однако большинство из них было посвящено методам обработки непрерывных сигналов с помощью аналоговых вычислителей. Обзоры первых работ по адаптивным системам можно найти в / / - / / . Сложность реализации систем этого типа и, самое главное, отсутствие универсальных методов их построения привели к тому, что в последующие годы интерес к ним несколько угас. В этой вводной главе дается краткий анализ основных и в частности многомерных схем адаптации. Сравнение различных направлений в области разработки адаптивных систем показывает, что само понятие «адаптация» зачастую толкуется по-разному. Некоторые трактовки этого термина. были приведены в работе / /, здесь же предложен и ряд новых определений. Ниже обсуждаются лишь такие схемы адаптивных регуляторов, которые основаны на описании систем управления по их входным и выходным сигналам. С целью упрощения выкладок рассматриваются только объекты с одним входом и одним выходом.
где
А — алгоритм настройки;
Р — регулятор;
О — объект управления.
Главное отличие адаптивных систем управления от систем с фиксированными параметрами и структурой состоит в том, что они могут приспосабливаться (подстраиваться) к изменяющимся характеристикам объектов и протекающих в них процессов.
Динамические свойства некоторых объектов полностью определяются внешними факторами, доступными прямому измерению (например, интенсивностью потока, скоростью объекта и т. п.). Если известно, как
Настройка с
обратной связью (адаптация по замкнутому
циклу)
Рисунок 1

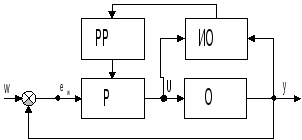
В условиях, когда невозможно оценить динамические свойства объекта непосредственно, приходится использовать настройку с обратной связью, или адаптацию по замкнутому циклу. При этом необходимый минимум информации об объекте (его порядок, параметры) получают путем обработки измерений входных и выходных сигналов. Для оценки характеристик объекта могут применяться методы идентификации (по измерениям входа U и выхода Y) или определения показателей качества управления (по измерениям ew и U). Исходя из полученных данных производится расчет и настройка регулятора. Структурно это равносильно введению второй обратной связи и соответственно второго замкнутого контура, в котором информация циркулирует следующим образом: сигналы в контуре управления — алгоритм настройки — регулятор — сигналы в контуре управления.
Самооптимизирующийся
адаптивный регулятор (СОАР)
Рисунок 2
первому относятся самооптимизирующиеся регуляторы, задачей которых является достижение наилучшего качества управления при заданном критерии оптимальности и наличии определенной информации об объекте и о его сигналах .
Процесс адаптации в системах управления с регуляторами этого типа проходит в три этапа:
-
Идентификация объекта или системы управления в целом.
-
Расчет регулятора.
-
Адаптивный регулятор о эталонной моделью (АРЭМ)

Рисунок 3
Настройка регулятора.
Обзоры современных методов построения самооптимизирующихся регуляторов содержатся в работах / /,/ /.
Во вторую группу адаптивных регуляторов входят регуляторы с эталонной моделью. Их задача состоит в получении такой реакции замкнутого контура управления на определенный входной сигнал, которая была бы максимально близка к реакции на этот же сигнал заданной эталонной модели. Очевидно, данный принцип адаптации предполагает наличие некоторого измеряемого внешнего сигнала (например, задающего воздействия в следящей системе), причем адаптация производится лишь в те периоды, когда .этот сигнал начинает изменяться. В данном случае процесс адаптации также состоит из трех этапов:
-
Сравнение реакций замкнутого контура управления и эталонной модели.
-
Расчет регулятора.
-
Настройка регулятора.
Если в системе используется эталонная модель с фиксированными параметрами, со временем реакция системы приближается к реакции этой модели, которая не обязательно должна быть «оптимальной». Обзоры по системам с эталонной моделью можно найти в работах / /,/ /. Достоинством систем этого класса является их способность к быстрой адаптации при подаче входных сигналов определенной формы. Немаловажно и то, что для них разработаны хорошо себя зарекомендовавшие методы синтеза, в основе которых лежит теория устойчивости нелинейных систем. В то же время следует иметь в виду, что системы данного типа не могут адаптироваться к внешним условиям, если измеряемый входной сигнал остается неизменным. В этом смысле самооптимизирующиеся регуляторы обладают существенным преимуществом, поскольку адаптируются к внешним возмущениям даже в тех случаях, когда они не поддаются измерению.
Для нестационарных объектов с запаздыванием в результате проведенного обзора существующих методов самонастройки адаптивных регуляторов установлено, что наибольшее применение на практике получили: метод автонастройки параметров ПИ-регулятора с помощью введения релейного элемента в канал ошибки, метод EXACT фирмы “Фоксборо”, базирующийся на анализе реакции замкнутой системы с ПИД - регулятором на пробные импульсные возмущения, метод настройки регуляторов, предложенный В.Я.Ротачем и основанный на подаче пробного гармонического сигнала на задатчик регулятора.
Переходные процессы многомерных объектов при. наличии внешних возмущений и задающих сигналов зависят как от точек их приложения, так и от того, действуют ли они последовательно или одновременно. Для двумерных процессов рассматриваются в основном следующие случаи: возмущение воздействует на оба контура. Такая ситуация возникает, например, при изменении рабочей точки или нагрузки, что в большинстве случаев выражается в одновременном изменении энергии, массопередачи или движущих сил; возмущения независимы. Оба возмущения могут изменяться одновременно, как, например, в случае статистически независимых шумов. Однако они могут появляться последовательно, как обычные детерминированные возмущения; задающие переменные могут изменяться одновременно или независимо.
В реальных системах не всегда представляется возможность заранее предусмотреть внешние влияния, поэтому современные системы управления требуют все более новые подходы. Так известна идея использования частотного разделения каналов управления и самонастройки. Впервые идея была рассмотрена в работах / /,/ /. В них разделение каналов осуществлялось путем включения избирательного фильтра в контур адаптации. Целью самонастройки было обеспечение постоянства произведения коэффициентов усиления пропорционального регулятора и объекта управления. Такой подход не позволяет контролировать изменение других параметров объекта настраивать ПИ и ПИД-регуляторы, а также регуляторы более сложной структуры. В связи с этим в работе Мазурова В.М. / / предлагается новый принцип построения адаптивных систем использующий частотное разделение каналов управления и самонастройки. В основу этого принципа в отличии от ранее известных подходов положены следующие идеи:
1) Частотное разделение каналов управления и самонастройки осуществляется путем включения точно настроенного цифрового заграждающего фильтра в главный контур системы что позволяет исключить искажающее влияние регулятора на гармоническую составляющую выходного сигнала объекта на частоте пробных колебаний подаваемых на его вход и обеспечить однозначное определение критической частоты объекта;
2) В качестве пробного сигнала выбран гармонический сигнал содержащий одну или несколько периодических составляющих формируемых высокоточным цифровым генератором. Такой сигнал несмотря на ограниченную информационную емкость позволяет оптимально настраивать типовые регуляторы и в то же время обеспечивает высокую помехоустойчивость контура адаптации за счет знания точного значения текущей частоты пробного сигнала;
3) Использование высокочувствительного и помехоустойчивого метода синхронного детектирования для определения параметров критических колебаний позволяет резко уменьшить амплитуду пробного сигнала устойчиво оценивать параметры при наличии шумов и тем самым повысить надежность работы адаптивного регулятора в промышленных условиях;
-
Определение параметров критических колебаний объекта или разомкнутой системы позволяет использовать эффективные и проверенные на практике методы В.Я.Ротача для расчета настроек ПИ-регуляторов.
Одним из новых направлений построения адаптивных регуляторов является использование в них цифровой модели объекта параметры которой определяются с помощью блока идентификации. По текущим оценкам этих параметров производится расчет настроек типовых ПИ или ПИД-регуляторов либо расчет коэффициентов регулятора состояния В качестве алгоритма идентификации наибольшее распространение получил рекуррентный метод наименьших квадратов (РМНК).
Однако в настоящее время еще не начато серийное производство адаптивных регуляторов построенных на этом принципе. Главным сдерживающим фактором здесь является отсутствие достаточно объективной информации о точности получаемых оценок параметров объекта управления и о возможности их использования для расчета настроек регуляторов. В связи с этим такие регуляторы не гарантируют получения в системе заданных запасов устойчивости. Ликвидировать этот недостаток помогает алгоритм адаптивного модального управления с частотным разделением каналов регулирования и самонастройки.
Введение генератора шума способствует более точному определению блоком идентификации текущих оценок параметров объекта. Однако если рекуррентные методы идентификации не применяются то генератор шума не используется.
Наличие контура адаптации позволяет существенно ослабить требования к точности вычисления параметров объекта управления в блоке идентификации а использование современных подходов к построению структуры адаптивного регулятора совместно с идеей частотного разделения каналов регулирования и самонастройки дает возможность создать алгоритмы обеспечивающие качественное управление объектами с запаздыванием при широкой вариации их параметров.
Таким образом в работах / /,/ / принципы построения адаптивных регуляторов состояния базируются на следующих положениях:
а) в качестве регуляторов состояния используются модальные регуляторы с блоками наблюдения и упреждения имеющие один настраиваемый параметр - величину кратного корня;
б) частотное разделение каналов достигается путем включения за регулятором цифрового заграждающего фильтра;
в) настройка регулятора состояния осуществляется контуром адаптации путем такого изменения величины и частоты пробных колебаний при которых обеспечивается заданный по амплитуде запас устойчивости на критической частоте колебаний разомкнутой системы;
г) запас устойчивости контролируется по амплитуде колебаний гармонической составляющей выходного сигнала U регулятора на критической частоте системы;
д) с целью уменьшения искажающего влияния заграждающего фильтра на динамику замкнутой системы рекомендуется ввести внутренние переменные фильтра в координаты вектора состояния регулятора. Однако в этом случае амплитуда колебаний сигнала U не будет точно характеризовать запас устойчивости в системе;
е) пробный синусоидальный сигнал может подаваться только на объект либо на объект и модель одновременно. В последнем случае это приводит к резкому увеличению критической частоты системы, повышению быстродействия контура адаптации. Одновременно сильно уменьшается амплитуда колебаний на выходе объекта, что затрудняет ее выделение.
Адаптивные регуляторы состояния способны в процессе функционирования автоматически изменять структуру и производить перерасчет коэффициентов при вариациях величины запаздывания и других параметров объекта значения которых могут определяться с помощью описанного ранее алгоритма идентификации по частотным характеристикам процесса либо с помощью рекуррентного метода наименьших квадратов.