График переходной функции заданной нескорректированной системы. Оценка показателей качества нескорректированной системы
Переходная функция h(t) звена – это реакция звена на единичное воз - действие 1(t) при условии, что до момента приложения воздействия звено находилось в состоянии покоя, т.е. начальные условия были нулевыми.
Построим график переходной функции h(t) заданной нескорректированной системы в приложении Simulink пакета Matlab:
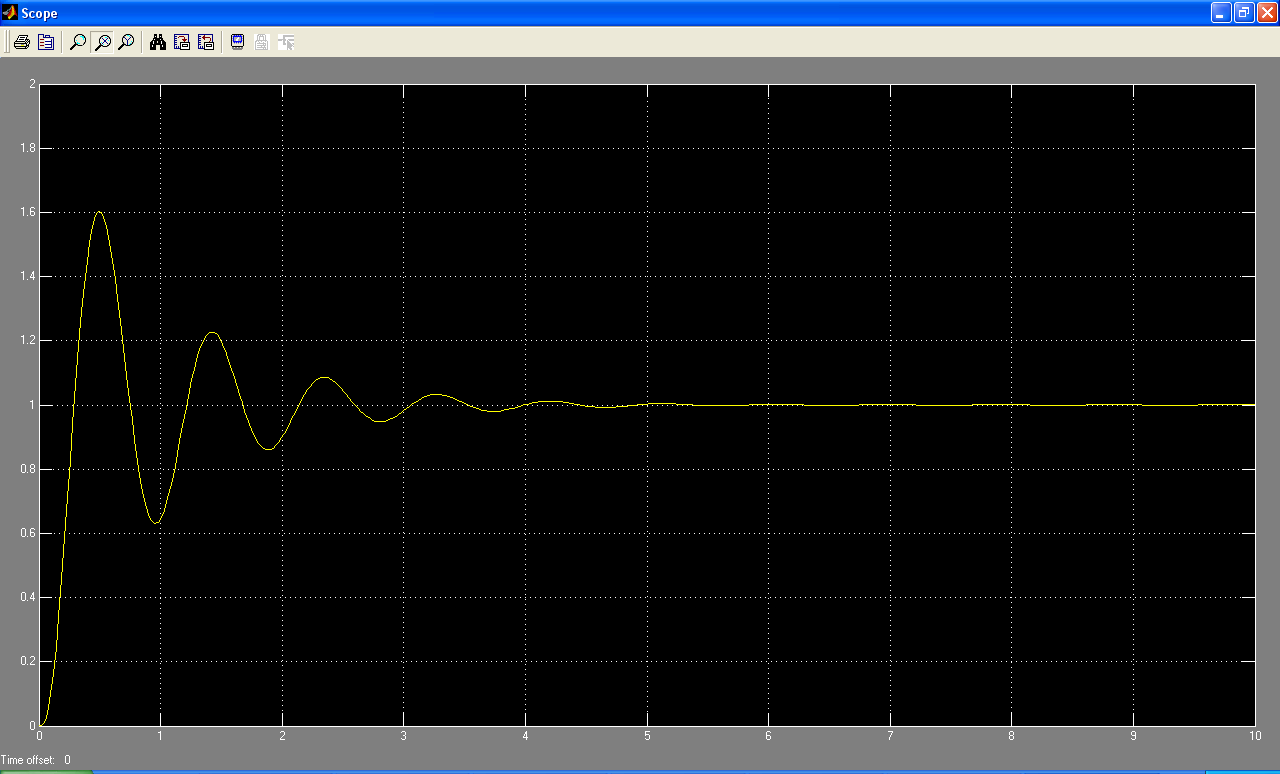
Рис. 9- Переходный процесс нескорректированной системы
Склонность системы
к колебаниям, а, следовательно, и запас
устойчивости могут быть охарактеризованы
максимальным значением управляемой
величины hmax
или так
называемым перерегулированием
![]() :
:
![]() ,
где h(
,
где h(![]() )
)![]() 0
представляет
собой установившееся значение управляемой
величины после завершения переходного
процесса.
0
представляет
собой установившееся значение управляемой
величины после завершения переходного
процесса.
Быстродействие
системы определяется по длительности
переходного процесса tp.
Длительность
переходного процесса определяется как
время, протекающее от момента приложения
на вход единичного скачка до момента ,
после которого имеет место неравенство
![]() ,
где
,
где![]() -
заданная малая постоянная величина,
представляющая собой обычно допустимую
ошибку; под
-
заданная малая постоянная величина,
представляющая собой обычно допустимую
ошибку; под
![]() обычно принимают
некоторую долю входного воздействия,
составляющую, как правило, от 1 до 5%
величины скачка на входе.
обычно принимают
некоторую долю входного воздействия,
составляющую, как правило, от 1 до 5%
величины скачка на входе.
Определим показатели качества нескорректированной системы:
Из рисунка 9 определяем перерегулирование системы:
Исходя из рисунка 10 можем определить время регулирования системы:
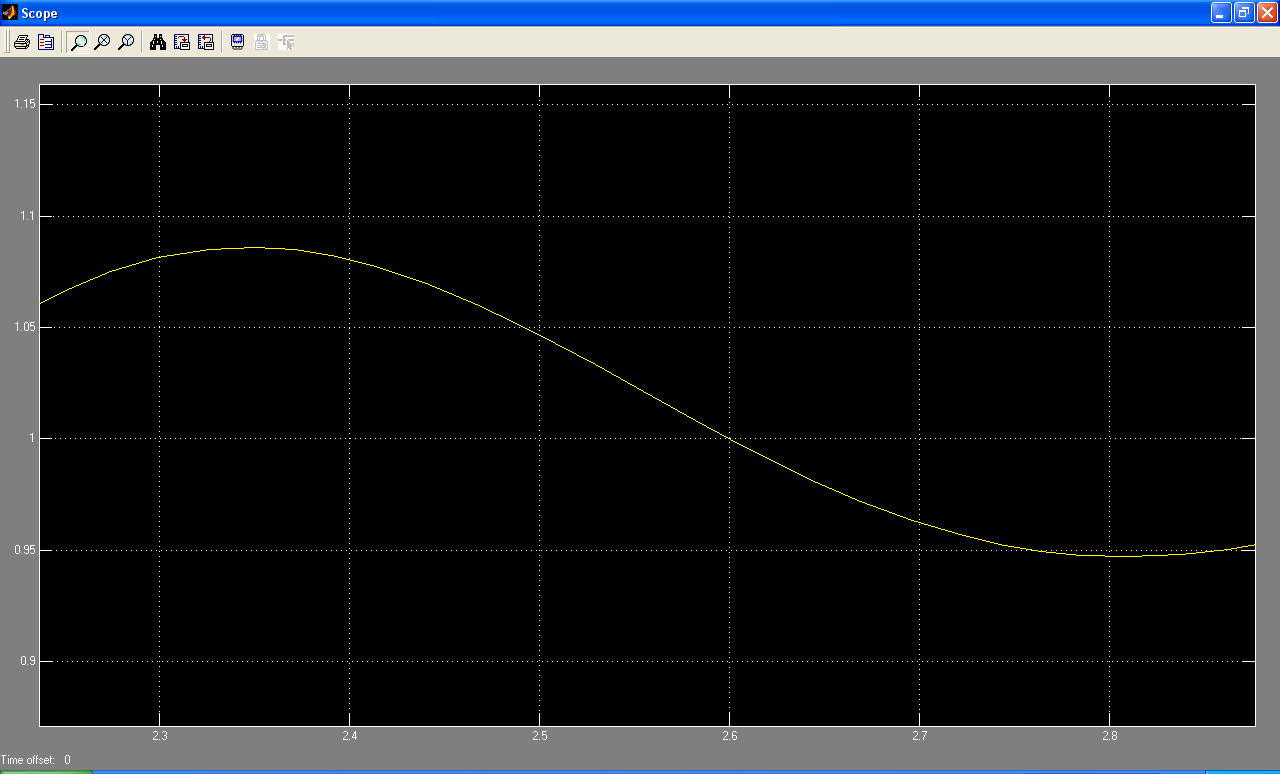
Рис. 10- Переходная характеристика замкнутой системы в увеличенном масштабе
![]()
Перерегулирование нескорректированной системы не удовлетворяет требуемому (<=5%), а время регулирования лежит в пределах требуемых значений (tрег<=2.5).
8. Синтез последовательного корректирующего устройства методом Соколова.
Проведем синтез последовательного корректирующего устройства методом Соколова.
Передаточная функция нескорректированной системы:

1) Определяем
разность порядков полиномов числителя
(m1)
и знаменателя (n1)
передаточной функции замкнутой
нескорректированной системы (n1-m1):![]()
Формируем желаемую передаточную функцию замкнутой системы, на основе нормированных передаточных функций. Заданный порядок астатизма системы: νзад=1.
Нормированная функция имеет вид:

Определяем порядок числителя и знаменателя нормированной передаточной функции:
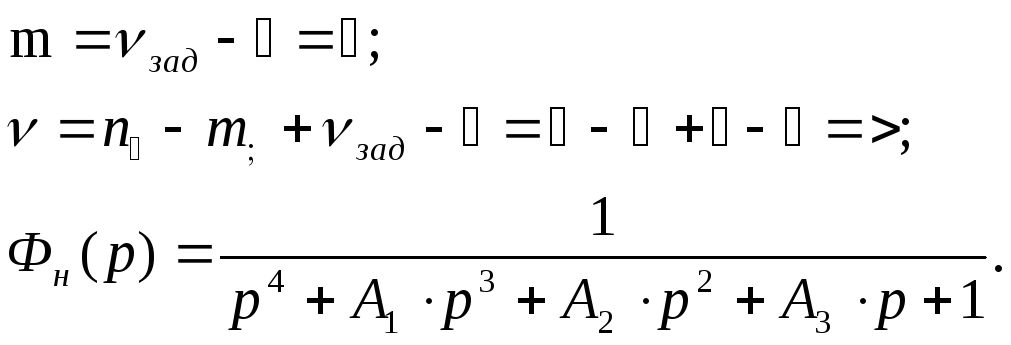
2) Коэффициенты
нормированной передаточной функции
для критического затухания переходного
процесса выбираем исходя из показателей
качества. Т.к. время регулирования tрег
укладывается в необходимые пределы, а
требуемое перерегулирование (![]() =5%)
оказалось значительно меньше
полученного(
=5%)
оказалось значительно меньше
полученного(![]() =60%),
то воспользуемся приложением А, таблицей
А.2, из которой определим значения
коэффициентов, а также нормированное
время
=60%),
то воспользуемся приложением А, таблицей
А.2, из которой определим значения
коэффициентов, а также нормированное
время![]() :
1; 3; 4.25; 3; 1; τн=5.1.
:
1; 3; 4.25; 3; 1; τн=5.1.
![]()
Желаемая передаточная функция выбирается с использованием теоремы масштабов преобразования Лапласа:
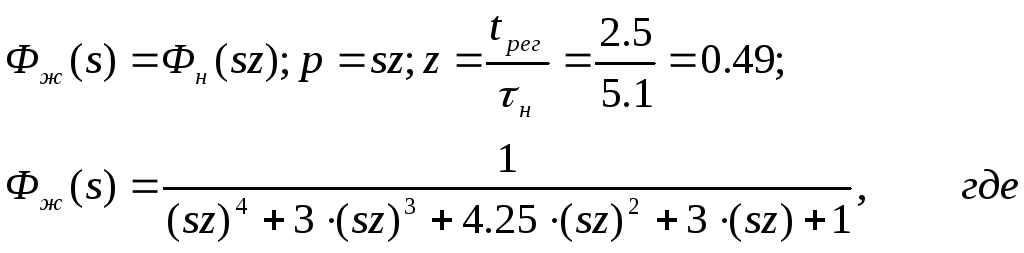
p – аргумент нормированной передаточной функции,
s – комплексный аргумент Лапласа,
z – коэффициент масштаба времени,
tрег – заданное время регулирования,
![]() –время регулирования
нормированной передаточной функции.
–время регулирования
нормированной передаточной функции.
Определяем желаемую передаточную функцию:
![]()
3) Определим корректирующее устройство: