


ЗАДАНИЕ
к курсовой работе по «ТАУ»
«Комплексный анализ следящей системы»
Объектом исследования является следящая система, структурная схема которой показана на рис.1.

Рис.1 Структурная схема следящей системы
Kизм– передаточный коэффициент измерительного устройства;
Kфчв– коэффициент передачи
Тфчв– постоянная времени фазо-чувствительного выпрямителя;
Кэму– коэффициент передачи электромашинного усилителя;
Тэму – постоянная времени электромашинного усилителя;
Кд– коэффициент передачи электрического двигателя;
Тд– постоянная времени электрического двигателя;
Кред– коэффициент передачи редуктора.
Исходные данные для моделирования:
Kизм= 25 В/град
Kфчв= 1 В/град
Тфчв= 0,007 сек
Кэму= 3,2 В/град
Тэму= 0,03сек
Кд= 5 В/град
Тд= 0,15 сек
Кред = 0,001 В/град
σ = 0
tp= 1,5
Содержание
Введение………………………………………………………………..…..6
Выражение для передаточной функции разомкнутой системы……………………………………………………………………..….7
Выражение и построение АФХ W(j), АЧХ W(), ФЧХ () разомкнутой системы с использованием пакета моделирования Matlab………..…….…8
Оценка устойчивости замкнутой системы с помощью критерия Гурвица………………………………………………………………………..11
Оценка устойчивости замкнутой системы с помощью критериев Михайлова…………………………………………………………………….12
Оценка запасов устойчивости системы по модулю и по фазе с помощью АФХ……………………………………………………...……………………14
Построение ЛАХ и ЛФХ разомкнутой системы в Matlab. Оценка запасов устойчивости системы по модулю и по фазе………………………………15
Построение графика переходной функции h(t) заданной нескорректированной системы вMatlab. Оценка показателей качества нескорректированной системы………………………………...……………16
Проведение синтеза последовательного корректирующего устройства методом Соколова……………………………………………………............18
Построение ЛАХ и ЛФХ скорректированной разомкнутой системы в Matlab. Оценка запасов устойчивости скорректированной системы по модулю и по фазе. Сравнение с запасами устойчивости нескорректированной системы………………………………………….…..19
Построение графика переходной функции h(t) скорректированной системы в приложенииOctave. Оценка показателей качества скорректированной системы…………………………………………….…..20
Заключение………………………………………………………………..22
Список использованной литературы…………………………………….23
Введение
Задачей управления является обеспечение выполнения требуемых функций объектом управления в условиях реальной эксплуатации.
Следящая система – это вид системы автоматического управления, в которой заранее неизвестен вид управляющего воздействия. Обычно следящие системы предназначены для воспроизведения на выходе изменения управляющего воздействия и слежения за ним.
В данной курсовой работе необходимо провести комплексный анализ следящей системы, исследовать ее динамические характеристики, провести синтез корректирующего устройства следящей системы для обеспечения требуемых показателей качества управления: заданных величин перерегулирования и времени регулирования.
В схеме данной системы используется принцип обратной связи.
Выражение для передаточной функции разомкнутой системы
Передаточная функция измерительного устройства по условию имеет вид:
w1(s)=k![]() =25
=25
Передаточная функция фазо-чувствительного выпрямителя по условию имеет вид:
w2(s)=![]()
Передаточная функция электромашинного усилителя по условию имеет вид:
w3(s)=![]()
Передаточная функция двигателя по условию имеет вид:
w4(s)=![]()
Передаточная функция редуктора по условию имеет вид:
w5(s)=![]()
Так как все элементы системы соединены последовательно, то передаточная функция системы будет иметь следующий вид:
W(s)=![]() =
=![]() =
=
=
=![]()
2.Выражение и построение афх w(j), ачх w(), фчх () разомкнутой системы без использования и с использованием пакета моделирования Matlab.
а) Амплитудно-фазовая характеристика
(АФХ) – это график частотной
передаточной функции![]() ,
построенная на комплексной плоскости:
,
построенная на комплексной плоскости:
![]()
АФХ разомкнутой системы W(jw):
Сделаем замену s jwв передаточной функцииW(s)и получим АФХ

W(jω)=
Листинг программы:
num=[13.3333];
den=[0.0000315 0.00576 0.187 1 0];
w=12:0.1:100;
AFH=freqs(num,den,w);
u=real(AFH);
v=imag(AFH);
plot(u,v);
grid;
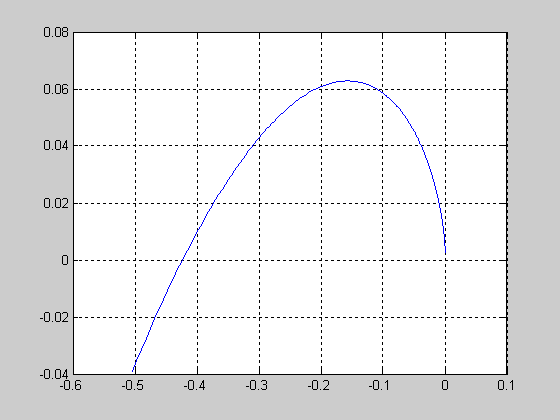
Рис. 1. График АФХ разомкнутой системыW(jw)
б) Амплитудно-частотная характеристика
(АЧХ) звена определяется отношением
амплитуд выходного и входного сигналов
на частоте![]() :
:
![]()
АЧХ разомкнутой системы W(w):

Листинг программы:
num=[13.3333];
den=[0.0000315 0.00576 0.187 1 0];
w=0.1:0.1:30;
ACH=freqs(num,den,w);
A=abs(ACH);
plot(w,A);
grid;
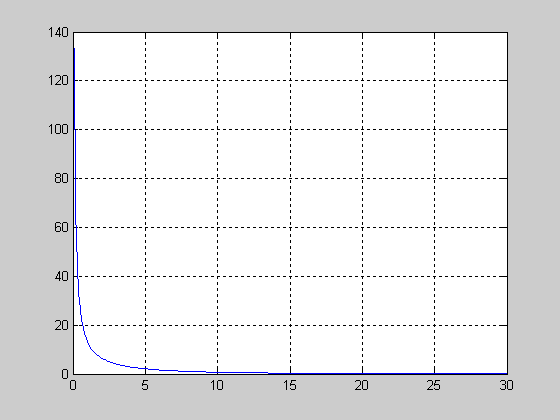
Рис. 2. График АЧХ разомкнутой системыW(w)
в) фазо-частотная характеристика (ФЧХ) определяет сдвиг по фазе между выходным и входным сигналами:
![]()
ФЧХ разомкнутой системы ():
![]()
Листинг программы:
num=[13.3333];
den=[0.0000315 0.00576 0.187 1 0];
w=0.1:0.1:30;
FCH=freqs(num,den,w);
phi=unwrap(angle(FCH))*180/pi;
plot(w,phi);
grid;
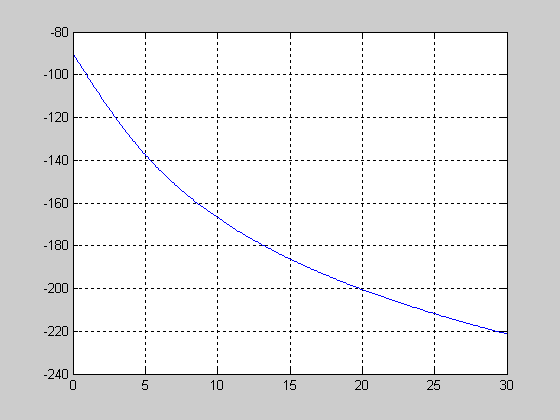
Рис. 3. График ФЧХ разомкнутой системы(w)