курсовая работа / ТАУ(Денис) / Записка(п.9)
.docx20
9 Определение параметров регулятора методом ЛАХ
Пусть
необходимо обеспечить перерегулирование
 и
время регулирования tрег
=
0.5с.
и
время регулирования tрег
=
0.5с.
ЛАЧХ
корректирующего устройства будем
определять как разность желаемой ЛАЧХ
и ЛАЧХ нескорректированной системы,
определяемой по заданным параметрам.
Cначала
найдём частоту среза ЛАЧХ. Она будет
определяться как
 ,где
n-коэффициент,
определяемый из графика на рисунке 9 по
заданной величине перерегулирования
σ%:
,где
n-коэффициент,
определяемый из графика на рисунке 9 по
заданной величине перерегулирования
σ%:
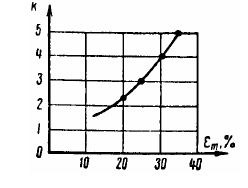
Рисунок
9 – График для определения

Отсюда
имеем, что
 . Далее нам нужно определить частоты
излома ЛАЧХ
. Далее нам нужно определить частоты
излома ЛАЧХ
 и
и
 .
. ,
а
,
а
 . И заключительным этапом определим
амплитуду среднечастотного участка
ЛАЧХ по рисунку 10:
. И заключительным этапом определим
амплитуду среднечастотного участка
ЛАЧХ по рисунку 10:
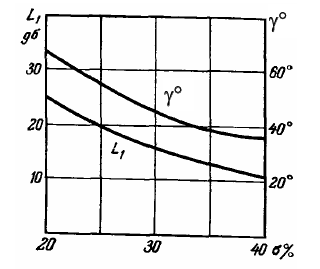
Рисунок 10 – Определение запаса по амплитуде
Для
нашего значения перерегулирования
имеем:L=20
дБ.
Наклон ЛАЧХ на частоте среза равен -20 .
По найденным параметрам строим желаемою
ЛАЧХ и графически, путём вычитания,
определяем ЛАЧХ корректирующего
устройства. ЛАЧХ корректирующего
устройства представлена на
.
По найденным параметрам строим желаемою
ЛАЧХ и графически, путём вычитания,
определяем ЛАЧХ корректирующего
устройства. ЛАЧХ корректирующего
устройства представлена на
рисунке 11:

Рисунок 11 – Определение ЛАЧХ корректирующего устройства
Получены сопрягающие частоты:

По
наклону ЛАЧХ корректирующего устройства
определяем, каким звеньям соответствуют
частоты излома: -
асимптоты инерционных звеньев,
-
асимптоты инерционных звеньев,
а
 -форсирующих
звеньев. На основании этого находим
передаточную функцию корректирующего
устройства:
-форсирующих
звеньев. На основании этого находим
передаточную функцию корректирующего
устройства:
где постоянные времени равны:

С учётом полученных постоянных времени составим передаточную функцию регулятора:

С
учётом полученной передаточной функции
корректирующего устройства получаем
следующую передаточную функцию замкнутой
системы:

По полученной передаточной функции замкнутой системы строим переходную характеристику скорректированной САР. Передаточная функция скорректированной САР представлена на рисунке 12:

Рисунок 12 – Переходная характеристика скорректированной системы