

Глава 3 Исследование нелинейной системы управления антенной.
3.1 Определение параметров автоколебаний.
Исследование нелинейной САУ методом гармонической линеаризации.
Система с нелинейным звеном показана на рис. .

Рис. 3.1. Система с нелинейным звеном.
Комплексным коэффициентом усиления нелинейного звена называется отношение первых гармоник выходного и входного сигналов, выраженных в комплексной форме [1] :
![]() (3.1.1)
(3.1.1)
, где

(3.1.2)
(3.1.3)
Комплексный коэффициент усиления показывает соотношение амплитуд и фаз гармоники входного и выходного гармонического сигналов, и в этом смысле напоминает комплексный коэффициент усиления линейного звена. Однако в отличие от линейного звена комплексный коэффициент усиления зависит не от частоты, а от амплитуды входного сигнала. Составляющие комплексного коэффициента усиления g(А) и b(А) называют коэффициентами гармонической линеаризации.
Рассмотрим безынерционное звено со статической характеристикой, которая представлена на Рис.3.2.
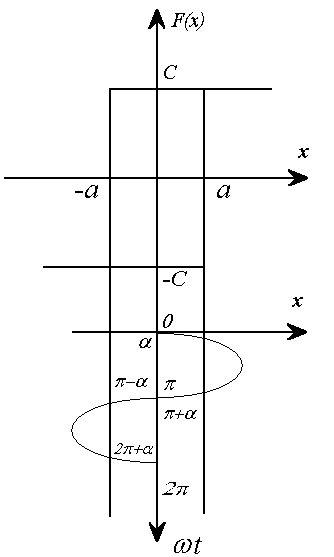
Рис. 3.2. Характеристика нелинейного элемента типа «двухпозиционное реле с гистерезисом».
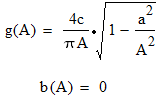
Найдём коэффициенты g(t) и b(t) уравнений релейного звена по формулам, данным выше:
Уравнение гармонического баланса с использованием комплексных коэффициентов усиления линейного и нелинейного звеньев можно записать следующим образом [2]:
![]() (3.1.4)
(3.1.4)
Система уравнений гармонического баланса: первое уравнение баланс амплитуд, а второе - баланс фаз [1]:
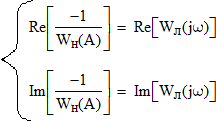
(3.1.5)
В формулу подставляем наши значения, тогда получаем:
![]()
![]()
![]()
Помножим числитель и знаменатель на сопряженное знаменателя, тогда получим:


Подставляем в систему уравнений полученные результаты:
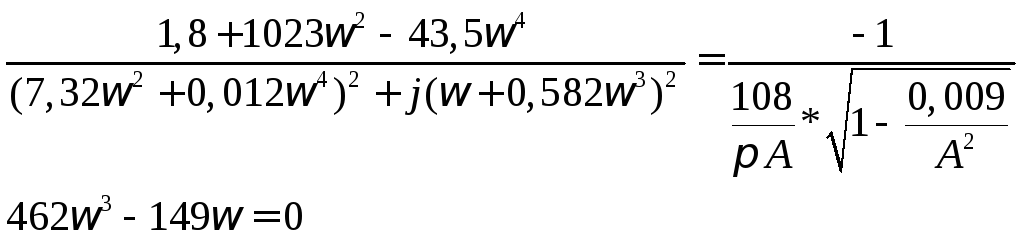

Решаем систему уравнений в математическом пакете MATHCAD, получаем:

На Рис. 3.3 изображены АЧХ линейной части и инверсного коэффициента гармонической линеаризации, взятого со знаком минус. Они пересекаются в двух точках, определяющих искомые автоколебательные режимы.
Рис. 3.3. АФЧХ линейной и нелинейной части системы.
Доказано, что автоколебания устойчивы, если, двигаясь по характеристике нелинейного элемента в сторону возрастания амплитуды, переходим из неустойчивой в устойчивую область D-разбиения [2]. Исходя из этого, в нашем случае автоколебания устойчивы при А=
Выводы
Глава 4 Моделирование системы управления антенной в математическом пакете matlab.
4.1 Моделирование системы управления антенной в линейном варианте.
Показатели качества процесса регулирования наиболее точно определяются решением уравнений динамики, описывающих САУ, с последующим построением кривой переходного процесса. Однако прямой анализ сложных систем, динамический режим которых описывается дифференциальными уравнениями высоких порядков, требует громоздких вычислений. Для количественной оценки показатели качества процесса управления таких систем используют математическое моделирование ЭВМ. В данной работе мы будем приводить моделирование системы управления в матричной системе компьютерной математики MATLAB 6.5 и её расширении – системе Simulink.
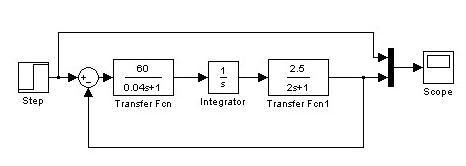 Структурная
схема исходной системы составленная вSimulink,
представлена на Рис. 4.1.
Структурная
схема исходной системы составленная вSimulink,
представлена на Рис. 4.1.
Рис. 4.1. Структурная схема исходной системы.

Рис. 4.2. ЛАЧХ и ЛФЧХ исходной системы.
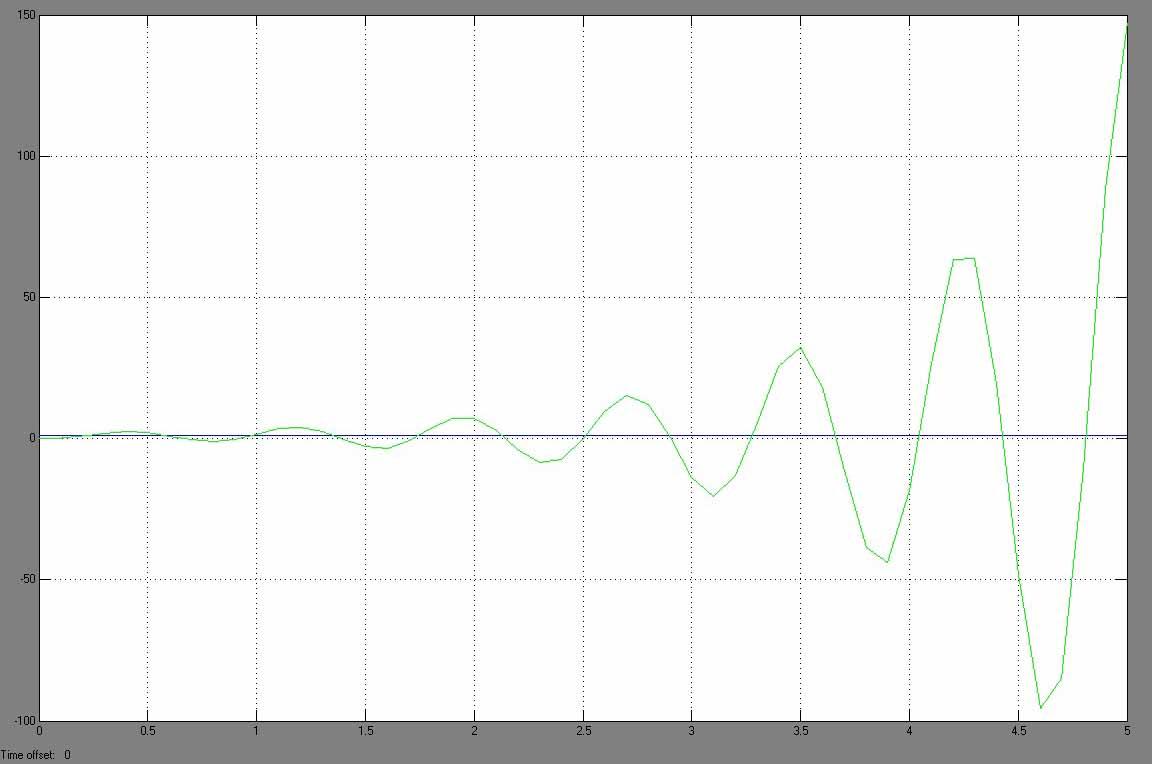
Рис. 4.3. Переходной процесс исходной системы.
При подаче на вход
системы Рис. 4.1. единичного воздействия
получаем переходной процесс исходной
системы Рис. 4.3. Из которого видно, что
система неустойчива, так процесс
расходящийся. Величина максимального
перерегулирования равна
![]() ,
что не удовлетворяет заданным. Статическая
ошибка в системе равна
,
что не удовлетворяет заданным. Статическая
ошибка в системе равна![]() .
.

Рис. 4.4. Отработка линейного входного сигнала исходной системой.
При подаче на вход системы Рис. 4.1. линейно возрастающего сигнала, получаем Рис. 4.4. изображающий отработку линейного входного сигнала. Из этого рисунка можно найти, что кинетическая ошибка равна бесконечности.
Для получения динамической ошибки исходной системы Рис. 4.1 подадим на её вход синусоидальный сигнал, изображённый на Рис. 4.4. Динамическая ошибка равна бесконечности .

Рис. 4.4. Отработка синусоидального входного сигнала исходной системы.
Из Рис. 4.2. и Рис. 4.3. можно сделать вывод, что исходную систему надо корректировать, так как система неустойчива. Структурную схему скорректированной системы можно видеть на Рис. 4.5.
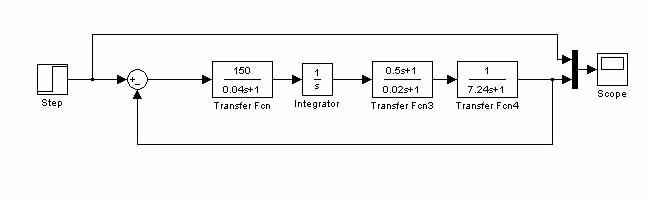
Рис. 4.5. Структурная схема скорректированной системы.
По передаточной
функции скорректированной системы
строим ЛАЧХ и ЛФЧХ Рис. 4.6. По которым
определяем запас по фазе на
![]() равныйY=
равныйY=
![]() ,
что удовлетворяет заданному.
,
что удовлетворяет заданному.
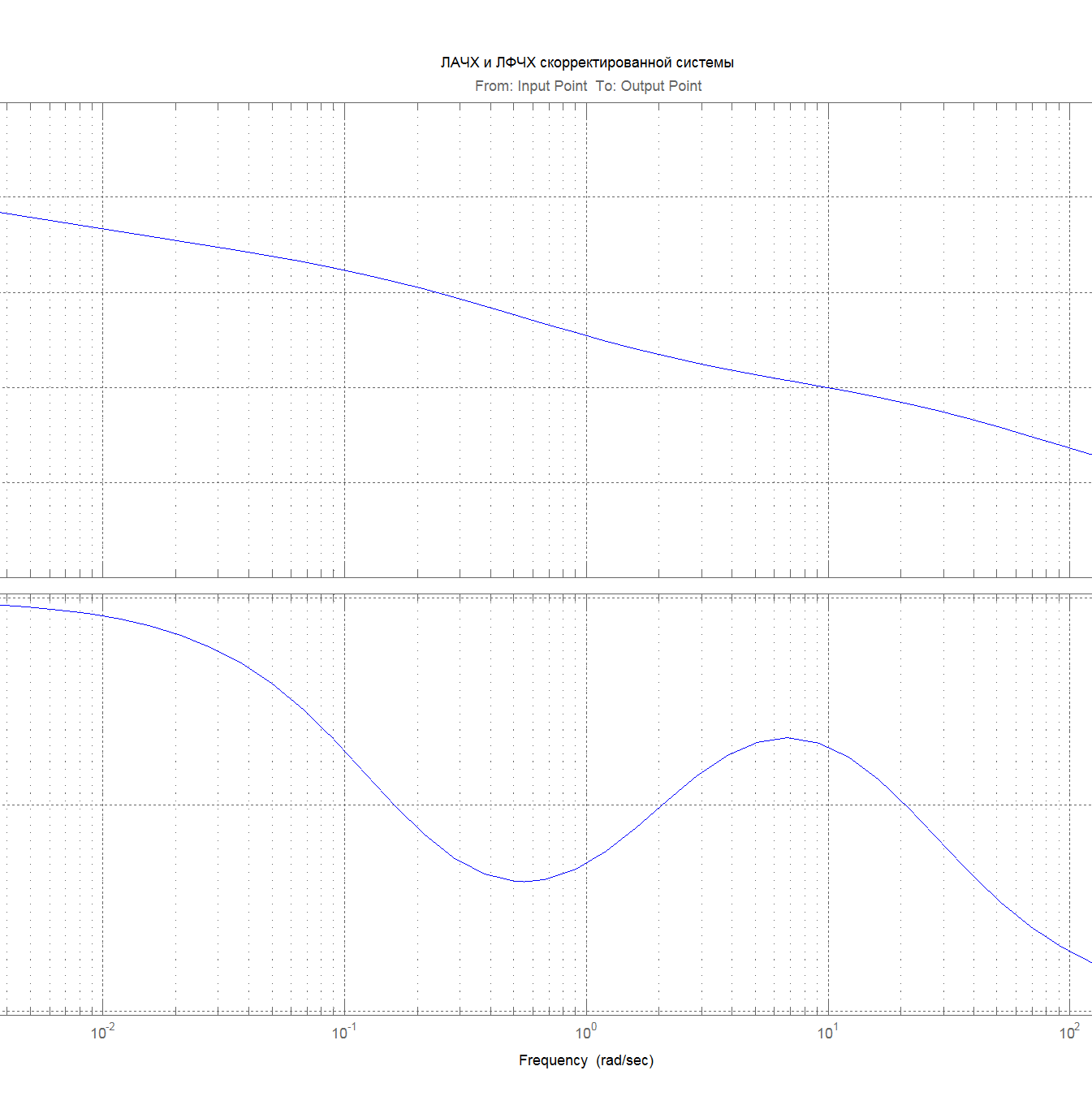 Рис.
4.6. ЛАЧХ и
ЛФЧХ скорректированной системы.
Рис.
4.6. ЛАЧХ и
ЛФЧХ скорректированной системы.
При подаче на вход системы Рис. 4.5. единичного воздействия получаем переходной процесс скорректированной системы Рис. 4.7. Из которого видно, что система устойчива, так как процесс сходящийся. Величина максимального перерегулирования равна 27%, что удовлетворяет заданному параметру. Статическая ошибка в системе равна 0.001
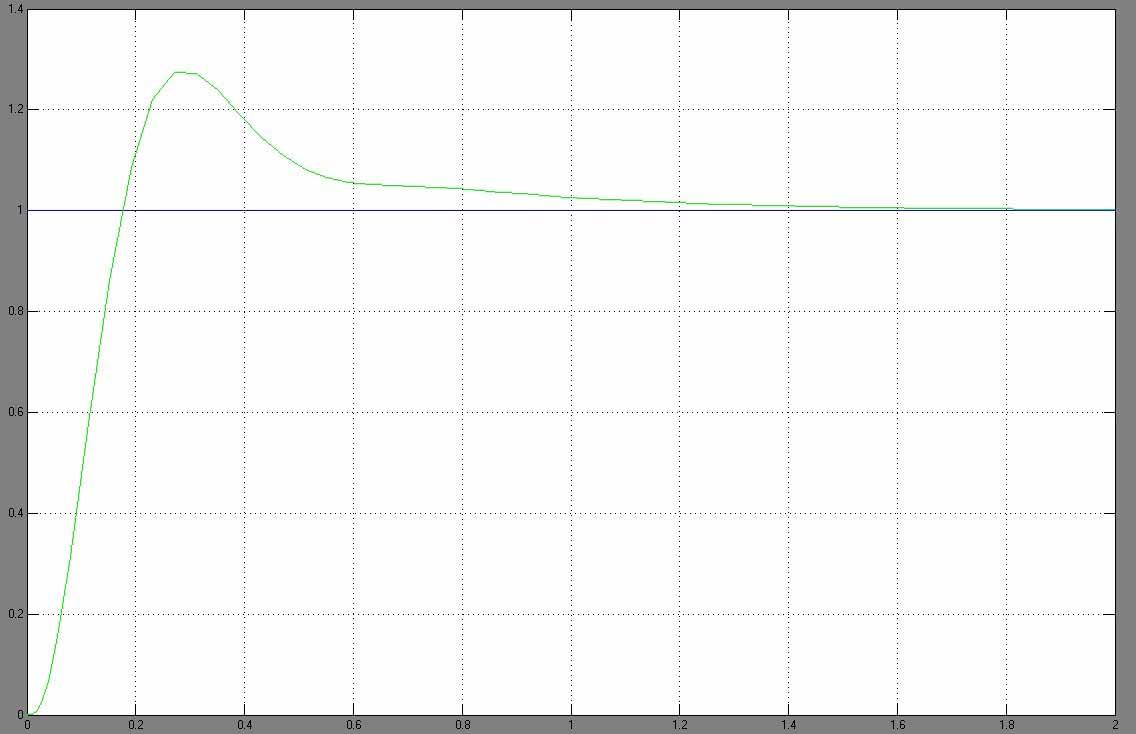
Рис. 4.7. Переходной процесс скорректированной системы.
Подавая на вход системы рис. 4.5. линейный сигнал, получаем кинетическую ошибку равную 0.0055 Рис.4.8.
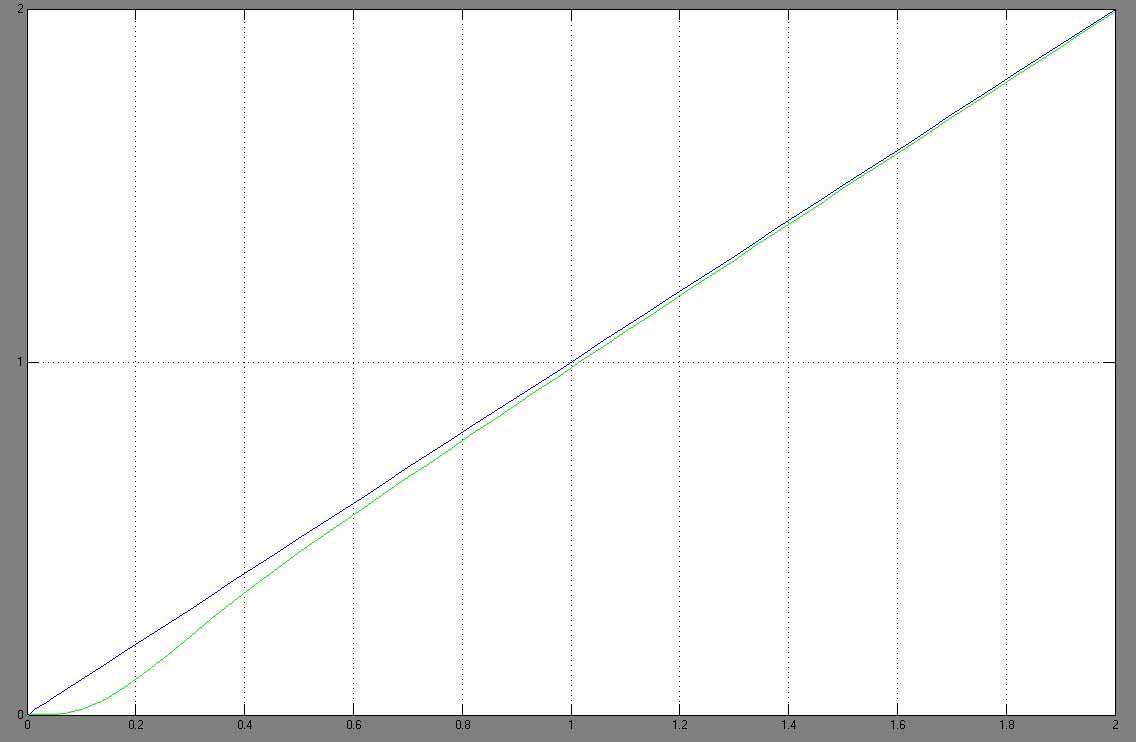
Рис. 4.8. Отработка скорректированной системой линейного входного сигнала.
При подаче на вход системы Рис. 4.5. синусоидального сигнала, получаем динамическую ошибку равную 0.037 Рис. 4.9.
 Рис.
4.9. Отработка
скорректированной системой синусоидального
входного сигнала.
Рис.
4.9. Отработка
скорректированной системой синусоидального
входного сигнала.