

1.3 Двухконтурная система наведения
Как уже отмечалось, высокая угловая точность достигается построением системы наведения по многоконтурной схеме при совместном использовании сравнительно «грубого», но работающего в большом диапазоне углов и скоростей силового контура, и более точных корректирующих контуров, работающих в поле ошибок силового привода.
Функциональная схема двухконтурной системы наведения с одним датчиком рассогласования представлена на рисунке 1.1.
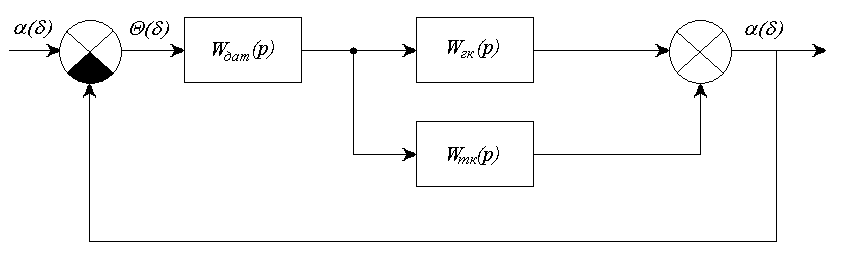
Рис 1.1 Функциональная схема двухконтурной системы наведения.
Рассмотрим принцип действия двухканальной системы. В двухканальных системах первый (основной) канал обычно называют грубым, а второй канал, работающий от ошибки первого и уменьшающий ошибку системы, называют точным.
Грубый канал в двухканальных системах автоматического управления решает в основном задачи усиления по мощности и воспроизведения на выходе низкочастотных составляющих спектра полезного сигнала. Точный канал предназначен для усиления высокочастотных составляющих спектра мощности полезного сигнала, который вследствие ограничений не в состоянии передать грубый канал. мощности на низких частотах и относительно небольшой мощности на высоких.
1.4 Исходные данные для разработки системы управления антенной.
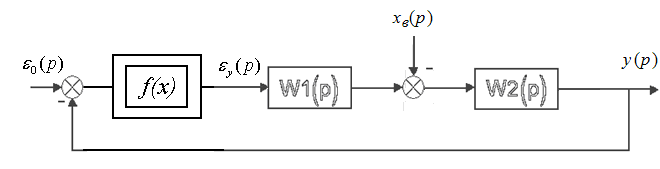
Рис. 1.2 Структурная схема точного контура антенной САУ.
![]()

,где:
![]() -коэффициент
усиления приёмника усилительно-преобразовательного
устройства;
-коэффициент
усиления приёмника усилительно-преобразовательного
устройства;
![]() - коэффициент
усиления исполнительного устройства;
- коэффициент
усиления исполнительного устройства;
![]() с
- постоянная времени приёмника
усилительно-преобразовательного
устройства;
с
- постоянная времени приёмника
усилительно-преобразовательного
устройства;
![]() с
- постоянная времени исполнительного
устройства;
с
- постоянная времени исполнительного
устройства;
Максимальная
ошибка точного контура
![]() ;
;
Скорость изменения
входного сигнала поступающего на вход
точного контура
![]()
![]() ;
;
Ускорение входного
сигнала
![]()
![]() ;
;
Запас устойчивости
по фазе
![]() ;
;
Величина максимального
перерегулирования
![]() ;
;
f(x) – нелинейный элемент статическая характеристика которого представлена на рисунке 1.3
с = 27 с; а = 0.03;
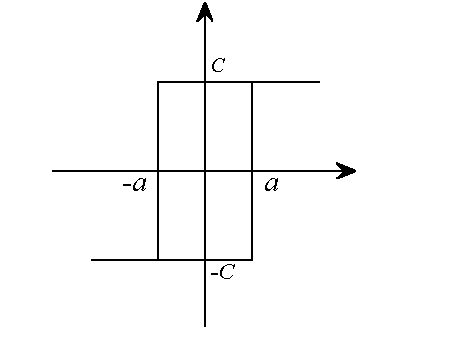
Рис. 1.3 Нелинейный элемент типа «Двухпозиционное реле с гистерезисом».
Необходимо:
В данной работе необходимо разработать, а затем провести исследование точного контура системы управления РЛС в режиме автосопровождения цели.
Для достижения поставленной задачи необходимо:
- определить и проанализировать показатели качества исходной системы без учёта нелинейной составляющей.
- определить устойчивость.
- если найденные показатели качества не удовлетворяют заданным, то определить корректирующее устройство.
- рассмотреть уже скорректированную нелинейную СНА.
Выводы
Система наведения антенны является сложной динамической системой автоматического регулирования, которая осуществляет функционирование в последовательно сменяющихся режимах. К одной из самых важных проблем, от успеха решения которой зависят эффективность и качество управляемой АУ, относится проектирование силового следящего привода, он является исполнительным элементом СНА, без которого невозможна работа ни в одном режиме.