

2.3 Исследование условий устойчивости исходной системы управления антенной.
Выполнение требований по точности должно сопровождаться обеспечением в системе управления необходимых запасов устойчивости. При проведении расчётов с помощью ЛЧХ удобно использование частотных оценок запаса устойчивости. Для этой цели наиболее удобен показатель колебательности (М), который представляет собой высоту наибольшего пика амплитудной частотной характеристики замкнутой системы, отнесённого к её начальной координате. Получение заданного показателя колебательности сводится к требованию, чтобы окружающую точку (-1,j0) и представляющую собой окружность.
Радиус этой окружности равен:

,а смещение центра влево относительно начала координат:

Такая запретная область показана на рис. 2.3
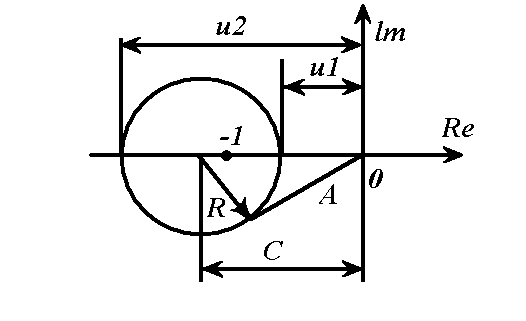
Рис. 2.3. Запретная область для АФЧ разомкнутой системы.
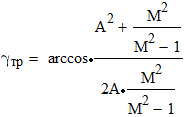
Можно найти условие того, чтобы АФХ разомкнутой системы не заходила в эту запретную область. Это имеет место в том случае, если запас по фазе, полученный в результате коррекции системы, не меньше требуемого запаса по фазе определяемого как:
![]() ,
(2.3.1)
,
(2.3.1)
где
![]()
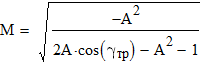
![]() (2.3.2)
(2.3.2)
Определим максимальный показатель колебательности нашей системы. Для этого
![]()
(2.3.3)

(2.3.4)
(2.3.5)
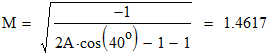
В нашей системе согласно техническому заданию необходимо обеспечить запас по фазе Yтр=40° на частоте среза, то есть при А=1. В этом случае имеем следующий показатель колебательности системы:
При этом требуемый запас по фазе Yтр обеспечивается, если А лежит в пределах:
![]()
И соответственно:
![]()
Что соответствует интервалу частот на ЛАЧХ:
![]()
При обеспечении
требуемой точности воспроизведения
полезного сигнала необходимо определить
запретную зону в низкочастотной области,
в которой ЛАЧХ системы проходить не
может. При этом мы будем исходить из
требований ограничения максимальной
ошибки воспроизведения полезного
сигнала в нашей системе
![]() при
известной максимальной скорости
изменения входного сигнала
при
известной максимальной скорости
изменения входного сигнала![]()
![]() и
максимальном ускорении
и
максимальном ускорении![]()
![]()
Для этих заданных значений можно определить контрольную точку для ЛАЧХ, ниже которой ЛАЧХ разомкнутой системы не должна опускаться, чтобы обеспечить заданную точность. Координаты контрольной точки определяются следующим образом:
 (2.3.6)
(2.3.6)
 (2.3.7)
(2.3.7)
При режиме задающего
воздействия, в котором амплитуда первой
его производной, то есть скорость,
по-прежнему равна максимальному
значению![]() ,
а амплитуда второй производной, то есть
ускорение, меньше максимального значения
,
а амплитуда второй производной, то есть
ускорение, меньше максимального значения
![]() ,
частота контрольной точки
,
частота контрольной точки
![]() будет меньше по сравнению с предельным
режимом, а амплитуда
будет меньше по сравнению с предельным
режимом, а амплитуда![]() будет больше. Таким образом, при уменьшении
амплитудыX,
контрольная точка будет перемещаться
в область низких частот по прямой,
имеющей наклон -40 дБ/дек. Если амплитуда
второй производной устремится к нулю,
то частота
будет больше. Таким образом, при уменьшении
амплитудыX,
контрольная точка будет перемещаться
в область низких частот по прямой,
имеющей наклон -40 дБ/дек. Если амплитуда
второй производной устремится к нулю,
то частота
![]() тоже устремится к нулю, что соответствует
режиму работы системы с постоянной
скоростью
тоже устремится к нулю, что соответствует
режиму работы системы с постоянной
скоростью![]() .
При этом отношение максимальной скорости
к максимальной ошибке определяет
предельное значение общего коэффициента
усиления системы, ниже которого нельзя
иметь реальный коэффициент усиления,
то есть добротность системы по скорости:
.
При этом отношение максимальной скорости
к максимальной ошибке определяет
предельное значение общего коэффициента
усиления системы, ниже которого нельзя
иметь реальный коэффициент усиления,
то есть добротность системы по скорости:
 (2.3.8)
(2.3.8)
При режиме задающего
воздействия, в котором амплитуда второй
производной входного воздействия
остаётся максимальной
![]() ,
а амплитуда первой производной
уменьшается, контрольная точка будет
перемещаться в область более высоких
частот, двигаясь по прямой, имеющей
наклон -40дБ/дек. Квадрат частоты точки
пересечения этой прямой с частотной
осью равен предельному коэффициенту
усиления разомкнутой системы, то есть
добротность по ускорению:
,
а амплитуда первой производной
уменьшается, контрольная точка будет
перемещаться в область более высоких
частот, двигаясь по прямой, имеющей
наклон -40дБ/дек. Квадрат частоты точки
пересечения этой прямой с частотной
осью равен предельному коэффициенту
усиления разомкнутой системы, то есть
добротность по ускорению:
 (2.3.9)
(2.3.9)
Область, расположенная ниже пересекающихся прямых с наклонами -40дБ/дек и -20дБ/дек, представляет собой запретную область для ЛАЧХ проектируемой системы.
Исходя из этого условия и условия обеспечения требуемого запаса по фазе, мы и будем строить корректирующее устройство непрерывной системы.