

5.2. Расчёт параметров регулятора по лачх и фчх
Коэффициент усиления всей системы на частоте эквивалентного гармонического сигнала:
![]() ,
откуда
,
откуда
![]() –коэффициент
усиления системы на частоте
–коэффициент
усиления системы на частоте
![]() , а на частоте
, а на частоте![]()
![]() .
.
В области низких частот наклон желаемой ЛАЧХ оставим -20 дБ/дек, чтобы не усложнять структуру регулятора.
Для расчёта области средних частот используя заданные время регулирования и величину перерегулирования по номограммам Солодовникова [3] определим частоту среза и рассчитаем запас устойчивости по фазе.
![]() ,
откуда
,
откуда
![]() .
.
![]()
![]()
Запас по фазе:
![]()
Графическим вычитанием ЛАЧХ ОУ из желаемой найдём ЛАЧХ регулятора, по которой можем составляем его передаточную функцию:
![]()
![]() ;
;
![]() .
.
5.3. Расчёт параметров регулятора по методу полной компенсации
![]() ;
;
![]() .
.
![]()
Запас по фазе:
![]()
Интегральная квадратичная оценка:

Следовательно при такой настройке регулятора переходный процесс в данной системе будет протекать быстрее, чем в первых двух случаях.
6. Моделирование системы, h(t) оценка качества
Для определения уравнения переходной характеристики воспользуемся преобразованием Лапласа:
![]()
Изображение
входного ступенчатого сигнала
![]() ,
тогда
,
тогда
![]()
![]() .
.
При моделировании
с параметрами
![]() ;
;![]() в Maple:
в Maple:
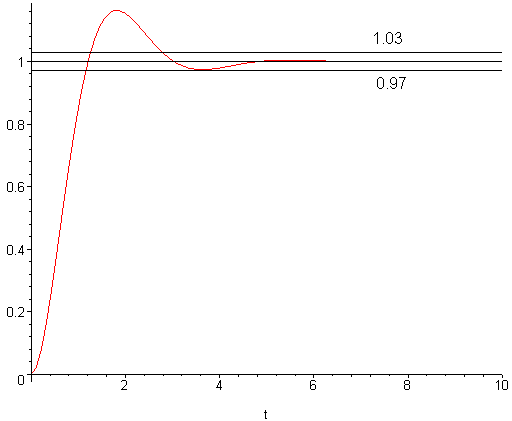
Перерегулирование составило 16%, а время регулирования 2,8 с.
При моделировании
с параметрами
![]() ;
;![]() в Maple:
в Maple:

Перерегулирование составило 21%, а время регулирования 3,5 с.
7. Выводы
8. Литература
Гурецкий Х. Анализ и синтез систем управления с запаздыванием. – М.: Машиностроение, 1974.
Кулаков Г.Т. Инженерные экспресс-методы расчёта промышленных систем регулирования: Спр. пособие. – Мн.: Выш. шк., 1984.
Топчеев Ю.И. Атлас для проектирования систем автоматического регулирования. – М.: Высшая школа, 1989.
Анхимюк В.Л., Опейко О.Ф., Михеев Н.Н. Теория автоматического управления. – М.: Высшая школа, 2002.
Иванова Л.В. Методические указания к курсовому проектированию по курсу «Теория автоматического управления». – ВТИЛП, 1993.
Кулаков Г.Т. Анализ и синтез систем автоматического регулирования: Учеб. пособие – Мн.:УП «Технопринт», 2003.
Санковский Е.А. Справочное пособие по теории автоматического регулирования и управления. – Мн.: Выш. шк., 1973.
Бесекерский В.А. Теория систем автоматического управления. – М.: Высшая школа, 1983.