

3. Анализ качества исходной сау
Главная передаточная функция замкнутой системы:

Передаточная функция по возмущению:

Анализ качества системы автоматического управления принято оценивать с помощью следующих показателей – времени регулирования, величины перерегулирования, значения ошибки в установившемся режиме, точности, и числа колебаний регулируемой величины за время переходного процесса.
Интервал времени, по истечении которого отклонение переходной характеристики от установившегося значения не превышает величины d = 5%, называется временем регулирования tp. Время регулирования является основной характеристикой быстродействия системы, т.е. определяет длительность переходного процесса. Примем d = 5%.

График главной передаточной функции исходной САУ
Анализируя главную передаточную функцию замкнутой системы F(p), с помощью программного пакета MATLAB, получили следующие характеристики:
Время регулирования: tp = 9.57 (c)
Величина перерегулирования: σ = 38.4 %
Расчитаем желаемы характеристики:
Kж = K/λ=17/0.3 = 57
σж = φ*100/Kж = 8*100/57=14 %
Определим запасы по фазе и амплитуде исходной САУ, используя графики логарифмических частотных характеристик.

ЛФЧХ и ЛАЧХ главной передаточной функции исходной САУ
Для устойчивости замкнутой системы, точка пересечения фазовой характеристики с линией -1800 должна лежать правее частоты среза, то есть правее точки пересечения амплитудной характеристики с осью абсцисс.
Требования по запасу устойчивости L() = 16 - 20 дБ, () > 400.
Запас по фазе: Δφ(ω)= 51.10;
Запас по амплитуде: ΔL(ω) обеспечен.
Построим график передаточной функции по возмущению:
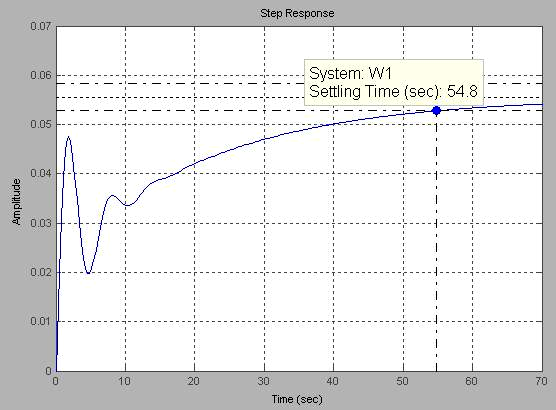
Кривая переходного процесса по возмущению
Время регулирования: tр = 54.8 с
Таблица 3 - показатели исходной и желаемой САУ.
|
Показатели качества |
Перерегулирование σ , % |
Время переходного процесса tp |
Коэффициент усиления K |
|
Желаемые |
14 |
22 |
57 |
|
Полученные |
38.4 |
9.57 |
17 |
Из анализа качества системы автоматического управления видно, что исходная система не удовлетворяет заданным показателям качества. Повысить качество процесса регулирования можно с помощью синтеза САУ, то есть необходимо изменить динамические свойства системы регулирования с помощью корректирующих устройств.
4. Синтез коррекирующих устройств
Рассмотрим синтез САУ с помощью включения корректирующих устройств в виде параллельного звена.
Параллельное корректирующее устройство будем подключать ко второму звену.
Строим располагаемую ЛАЧХ – L(w)=20log(W(jw)):
От высот 20 log K = 20 log 17= 24 по оси L, дБ/дек до частоты
log w1=log 1/T1 =log 1/7.7 = -0.88 проводим прямую с наклоном 0 дб/дек.
Начиная с w1 до частоты log w2 = log 1/2 = 0.22 – проводим прямую с наклоном –20 дБ/дек. И начиная с w2 – проводим прямую с наклоном –40дБ/дек.
Строим желаемую ЛАЧХ:
В интервале средних частот желаемая ЛАЧХ определяется заданными значениями перерегулирования и временем переходного процесса. Из соображения приближения реального процесса к оптимальному наклон среднечастотной асимптоты желаемой ЛАЧХ берут равным –20 дБ/дек.
Максимальное
значение
 представляет собой показатель
колебательностиМMAX.
Считается,
что
в хорошо демпфированных системах
регулирования показатель колебательности
не должен превосходить значение 1,1-1,5.
Примем М=1,2.
Примем
n=1.
Частоту
среза ωсp
найдем для заданных значений
перерегулирования и времени регулирования:
представляет собой показатель
колебательностиМMAX.
Считается,
что
в хорошо демпфированных системах
регулирования показатель колебательности
не должен превосходить значение 1,1-1,5.
Примем М=1,2.
Примем
n=1.
Частоту
среза ωсp
найдем для заданных значений
перерегулирования и времени регулирования:


Граничные значения сопрягающих частот среднечастотной области найдем по формулам, где М = 1.2 – показатель колебательности:




Сопряжение среднечастотной области с высокочастотной осуществляется переносом высокочастотной области ЛАЧХ в правую границу ωc1, среднечастотной области. В низкочастотной области для получения желаемого коэффициента усиления вводим добавочную сопрягающую частоту ω*=0.017c-1 и Т*=60.
ω*
ωcp ω2 ωc1
ω1
ωc2
0.1
1


0
L(Wж)


0
-20
-40
L(Wи)




-20


0
L(Wку)



-40
-40

0
-20
20
0



-40
ЛАЧХ располагаемой, желаемой САУ и корректирующего устройства
Область средних частот определяет пропускание средних частот и отвечает за качество системы. Построим ЛАЧХ корректирующего устройства, путем вычитания располагаемой ЛАЧХ из желаемой ЛАЧХ:
Lк.у.(ω) = Lж(ω) – Lр(ω)
По виду логарифмической характеристики определяем передаточную функцию последовательного корректирующего устройства:


По виду логарифмической характеристики определяем передаточную функцию разомкнутой системы скорректированной САУ:


F(t)

W2(p)


W1(p)







U(t)
E(t)
Y(t)

Wку(p)
Структурная схема желаемой САУ (с параллельной коррекцией)
Корректирующее звено мы размещаем после возмущения для того, чтобы улучшить качества системы, чтобы система удовлетворяла требуемым параметрам.