

Министерство образования Республики Беларусь
МОГИЛЁВСКИЙ ГОСУДАРСТВЕННЫЙ УНИВЕРСИТЕТ ПРОДОВОЛЬСТВИЯ
Кафедра «автоматизации технологических процессов»
КУРСОВОЙ ПРОЕКТ
по дисциплине: «Теория автоматического управления»
Тема: «Синтез САУ методом ЛАЧХ»
по специализации: 530101
«Автоматизация технологических процессов и производств»
Дата отправления: 12.05.2009г
_Не высылать_
Руководитель проекта Выполнил
ст. преподаватель студент группы
___________ ______________
«____» __________ 2009 г. «____»__________ 2009 г.
Домашний адрес:
2009
______________________РЕЦЕНЗИЯ______________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________
Содержание
3. Анализ качества исходной САУ 10
4. Синтез коррекирующих устройств 13
6. Анализ точности САУ 19
Заключение 26
Литература 27
Введение
Теория автоматического управления (ТАУ) изучает методы управления технологическими процессами, общие принципы построения систем автоматического управления (САУ), их расчета, математического моделирования, исследования и настройки. Целью управления является обеспечение требуемого течения процесса в объекте или требуемого изменения его состояния.
Целью выполнения курсовой работы по ТАУ является освоение теоретических методов и получение навыков по применению технологии моделирования сложных систем управления.
Задачи решаемые в курсовой работе :
анализ качества исходной САУ;
синтез методом оптимальных настроек регулятора;
анализ качества спроектированной САУ;
анализ точности спроектированной САУ;
Выполнение курсовой работы предусматривает получение дифференциального уравнения и передаточной функции объекта управления и его кривой разгона, исследование устойчивости САУ и качества регулирования.
1. Область применения систем
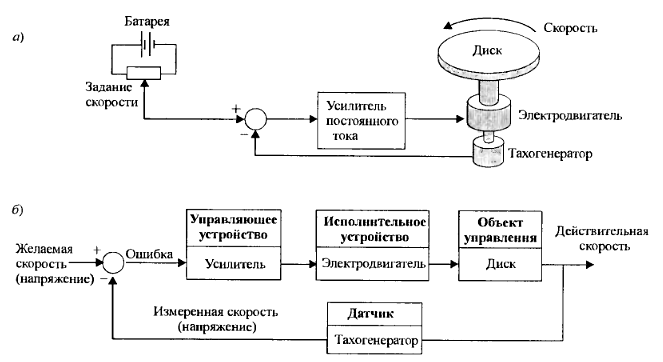
Во многих современных приборах используется диск, который должен вращаться с постоянной скоростью. Это, например, проигрыватель компакт-дисков или грампластинок, дисковод компьютера, требующие вращения с постоянной скоростью, несмотря на износ и изменение характеристик электродвигателя и вариацию других параметров. Наша задача состоит в синтезе системы управления скоростью вращения диска, которая гарантировала бы, что действительная скорость отличается от желаемой не более, чем на заданную величину. Мы рассмотрим вариант решения этой задачи, система с обратной связью.
Чтобы обеспечить вращение диска, мы должны в качестве исполнительного устройства выбрать электродвигатель постоянного тока, скорость вращения которого пропорциональна приложенному напряжению. Этот входной сигнал двигателя должен иметь достаточную мощность, поэтому нам также потребуется выбрать усилитель.
Чтобы реализовать систему с обратной связью, нам необходимо выбрать датчик. Одним из возможных решений является тахогенератор, выходное напряжение которого пропорционально скорости вращения его вала. Тогда замкнутая система будет иметь вид, изображенный на рис. 1.21 (а). Функциональная схема этой системы приведена на рис. 1.21 (б). Сигнал ошибки образуется как разность между входным напряжением и напряжением тахогенератора.
2. Разработка математической модели исходной сау
Исходные данные:
Таблица 1.
|
t |
0 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
|
|
h(t) |
0 |
0.3 |
0.9 |
1.6 |
2.5 |
3.3 |
4.2 |
5.2 |
6.1 |
7.1 |
|
|
t |
10 |
11 |
12 |
13 |
14 |
15 |
16 |
17 |
18 |
19 |
|
|
h(t) |
8.2 |
9.2 |
10.2 |
11.1 |
11.9 |
12.7 |
13.3 |
13.8 |
14.3 |
14.8 |
|
|
t |
20 |
21 |
22 |
23 |
24 |
25 |
26 |
27 |
28 |
29 |
30 |
|
h(t) |
15.3 |
15.7 |
16.0 |
16.3 |
16.5 |
16.6 |
16.7 |
16.8 |
16.9 |
17.0 |
17.0 |
Требуемое время регулирования: tр = 22 с;
Допустимое отклонение параметра от установившегося значения φ = 8;
Величина внешнего возмущающего воздействия λ = 0.3;
Построим кривую разгона, в программе MathCAD, по данным
из Таблицы 1.
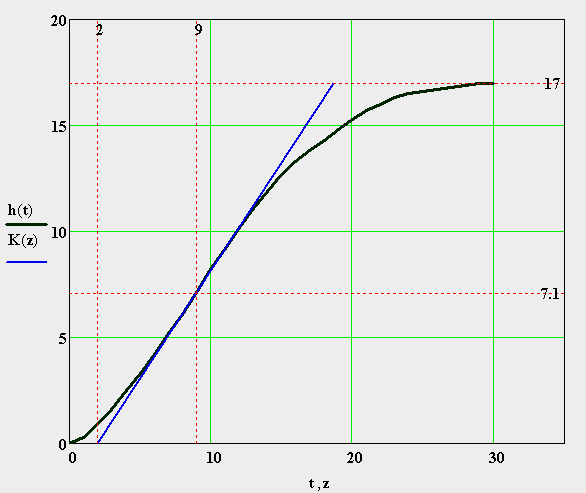
Заданная кривая разгона.
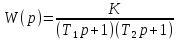
Передаточная функция апериодического звена 2 порядка имеет вид:
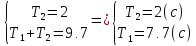
Для нахождения значений параметров Т1иТ2составим систему уравнений:
Коэффициент усиления К = 17.
Таким образом, получили передаточную функцию разомкнутой системы:

Построим кривую разгона по полученной передаточной функции.

Рассчитаем среднеквадратичное отклонение полученной кривой разгона от заданной:

где уз – заданное значение выходной координаты;
ур – рассчитанное значение выходной координаты;
N – число экспериментальных точек.
Значение sigma не должно превышать 10.
Таблица 2.
|
t |
0 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
|
|
h(t) |
0 |
0.3 |
0.9 |
1.6 |
2.5 |
3.3 |
4.2 |
5.2 |
6.1 |
7.1 |
|
|
hр(t) |
0 |
0.459 |
1.48 |
2.78 |
4.15 |
5.49 |
6.77 |
7.93 |
8.99 |
9.93 |
|
|
t |
10 |
11 |
12 |
13 |
14 |
15 |
16 |
17 |
18 |
19 |
|
|
h(t) |
8.2 |
9.2 |
10.2 |
11.1 |
11.9 |
12.7 |
13.3 |
13.8 |
14.3 |
14.8 |
|
|
hр(t) |
10.8 |
11.5 |
12.2 |
12.8 |
13.3 |
13.7 |
14.1 |
14.5 |
14.8 |
15.1 |
|
|
t |
20 |
21 |
22 |
23 |
24 |
25 |
26 |
27 |
28 |
29 |
30 |
|
h(t) |
15.3 |
15.7 |
16.0 |
16.3 |
16.5 |
16.6 |
16.7 |
16.8 |
16.9 |
17.0 |
17.0 |
|
hр(t) |
15.3 |
15.5 |
15.7 |
15.8 |
16 |
16.1 |
16.2 |
16.3 |
16.4 |
16.5 |
16.5 |
Проведя расчёты получаем:

Т.к. sigma меньше 10, значит, кривую разгона можно выразить полученной нами передаточной функцией разомкнутой системы:

Структурная схема представленной САУ изображена на рисунке,
где
W1
– устройство управления:
W2
– объект управления:

F(t)
E(t)
Y(t)









W1(p)
W2(p)

U(t)
Рисунок - Структурная схема исходной САУ