


Введение
Система предназначена для стабилизации движения самолета по тангажу.

Рисунок 1
Функциональная схема изображена на рис.1.
На
схеме обозначено: Х-
сила
лобового сопротивления; Y-
подъемная
сила; G
-
сила тяжести; Mz
- суммарный
момент, приложенный к самолету
относительно оси z;
P
— сила
тяги; вс
-
угол наклона траектории;
![]() -
углы атаки и тангажа; V
-
вектор скорости.
-
углы атаки и тангажа; V
-
вектор скорости.
Бортовая система управления по каналу тангажа включает датчики информации, автопилот, выполняющий функцию регулятора, и привод рулей высоты. В качестве датчиков информации используются датчик углового положения (ДУП) и датчик угловой скорости (ДУС).
Сигнал
с ДУП в виде напряжения
![]() ,
пропорционального
действительному
значению
угла тангажа самолета
,
пропорционального
действительному
значению
угла тангажа самолета
![]() ,
сравнивается с напряжением задатчика
,
сравнивается с напряжением задатчика
![]() ,
так
что на автопилот поступает напряжение
,
так
что на автопилот поступает напряжение
![]() , пропорциональное отклонению
, пропорциональное отклонению![]() угла
тангажа от требуемого значения. Сигнал
с ДУС представляется напряжением
угла
тангажа от требуемого значения. Сигнал
с ДУС представляется напряжением
![]() ,
пропорциональным
угловой скорости самолета
,
пропорциональным
угловой скорости самолета
![]() относительно
поперечной оси z.
относительно
поперечной оси z.
Уравнения возмущенного движения самолета, линеаризованные относительно некоторого режима полета, имеют вид:

где
![]() - отклонение
угла атаки от номинального значения;
- отклонение
угла атаки от номинального значения;
![]() -
отклонение
угла поворота
руля высоты;
-
отклонение
угла поворота
руля высоты;
![]() -
приведенное внешнее возмущение
(безразмерная величина),
природой которого могут быть вертикальные
составляющие порывов ветра, сброс
груза, находящегося не в центре тяжести
самолета и др.
-
приведенное внешнее возмущение
(безразмерная величина),
природой которого могут быть вертикальные
составляющие порывов ветра, сброс
груза, находящегося не в центре тяжести
самолета и др.
Система
работает следующим образом. При действии
внешнего возмущения
![]() изменяется
суммарный момент Mz
, что
приводит к изменению угла тангажа
самолета и появлению сигналов
изменяется
суммарный момент Mz
, что
приводит к изменению угла тангажа
самолета и появлению сигналов
![]() и
и
![]() с
датчиков информации. По этим сигналам
в автопилоте формируется управляющее
напряжение и
на
рулевой привод, который
изменяет угловое положение руля высоты
так, что возникающий при этом
аэродинамический момент компенсирует
изменение момента Mz
, и
угол тангажа самолета становится близким
к заданному.
с
датчиков информации. По этим сигналам
в автопилоте формируется управляющее
напряжение и
на
рулевой привод, который
изменяет угловое положение руля высоты
так, что возникающий при этом
аэродинамический момент компенсирует
изменение момента Mz
, и
угол тангажа самолета становится близким
к заданному.
Структурная схема системы стабилизации угла тангажа самолета:

1 АНАЛИЗ ЛИНЕЙНОЙ СУ
1.1 Упрощение структурной схемы СУ

Избавимся от последовательного соединения звеньев:
![]()
Далее избавимся от внутреннего встречно-параллельного участка схемы:

kv
Избавимся от последовательного соединения звеньев:


Далее избавимся от внутреннего встречно-параллельного участка схемы:

Т.к. на схеме обозначено:
![]() -
передаточное число (коэффициент передачи)
автопилота по углу тангажа;
-
передаточное число (коэффициент передачи)
автопилота по углу тангажа;
![]() -
передаточная функция рулевого привода;
-
передаточная функция рулевого привода;
![]() -
передаточная функция самолета по угловой
скорости тангажа;
-
передаточная функция самолета по угловой
скорости тангажа;
![]() -
передаточное число автопилота по угловой
скорости тангажа.
-
передаточное число автопилота по угловой
скорости тангажа.
Для передаточной функции разомкнутой системы можно записать

Где
![]() ;
;
![]() ;
;![]() ;
;
![]()
Передаточная функция замкнутой системы имеет вид

Где
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]()
![]() ;
;
![]() ;
;![]() ;
;
![]() ;
;
![]() ;
;![]()
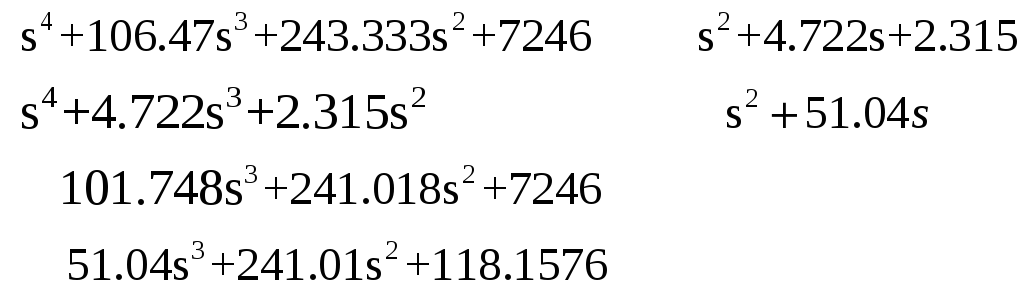
При этих значение для коэффициентов характеристического уравнения получим:
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]()
Тогда получим:


1.2 Построение АФЧХ системы
![]()
![]()
Получим частотную форму записи передаточных функций.
![]()
![]()
Выделим действительную и мнимую части замкнутой системы:
![]()
–
–
+
+
Выделим действительную и мнимую части разомкнутой системы:
+
+
+
+
Построим АФЧХ замкнутой системы:

График 1 – АФЧХ
Для построения графика использовались дискретные значения



1.3 Построение АЧХ, ФЧХ и ЛАЧХ системы
1.3.1 построение АЧХ
![]()
![]()



1.3.2 Построение ФЧХ
![]()
![]()


![]()
 График
3 – ФЧХ
График
3 – ФЧХ
1.3.3 Построение ЛАЧХ
![]()
![]()
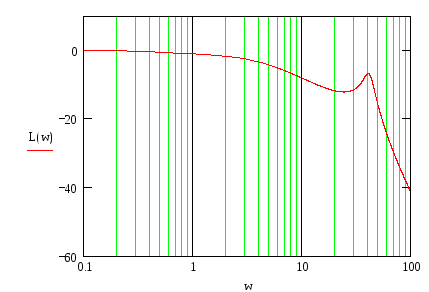
График 4 – ЛАЧХ


Определим устойчивость СУ по критерию Найквиста.
![]()
Определим устойчивость разомкнутой системы по критерию Ляпунова.
Устойчивость по Ляпунову означает, что все корни характеристического уравнения лежат в левой полуплоскости комплексной плоскости.
Запишем характеристическое уравнение разомкнутой системы:
![]()
Найдем корни характеристического уравнения для замкнутой системы:

Так как все вещественные части корней отрицательны, то корни характеристического уравнения находятся в левой полуплоскости комплексной плоскости, а это означает устойчивость системы.
По критерию
Найквиста: если система в разомкнутом
состоянии устойчива, то для устойчивости
замкнутой системы необходимо и достаточно,
чтобы АФХ разомкнутой системы для
![]() не охватывали точку с координатами (-1:
j0).
не охватывали точку с координатами (-1:
j0).
Построим годограф Найквиста:

График 5 – Годограф Найквиста
Устойчивая СУ с астатизмом n-го порядка.
1.5 Определение запасов устойчивости СУ
Построим ЛАЧХ и ЛФЧХ разомкнутой системы:
ΔL








Δ





![]()
ΔL=9 – Запас по амплитуде.
![]() -
запас по фазе.
-
запас по фазе.
1.6 Построение переходного процесса и оценка качества СУ

![]()
![]()
![]()
hуст tр



По графику
![]()
![]()
![]()
![]()
![]()
Перерегулирование

В данном случае перерегулирование равно 0 т.к. процесс монотонный.
![]() -
время за которое процесс входит в 5%-ую
трубку.
-
время за которое процесс входит в 5%-ую
трубку.
Заключение: с учетом этих показателей можно сделать вывод, что качество управления СУ достаточно хорошее и не требует дополнительной коррекции, так как перерегулирование и время регулирования малы.
2 АНАЛИЗ НЕЛИНЕЙНОЙ СУ
2.1 Построение по заданной структурной схеме СУ ее фазового портрета

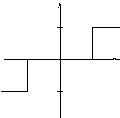
Нелинейный элемент:

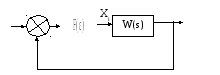
Разомкнем систему перед нелинейным элементом, перенося на новый вход системы регулирующее воздействие. Получим следующую структурную схему.

Упростим структурную схему, избавившись от встречно-параллельного и последовательных соединений
![]()
![]()
![]()
Структурная схема примет вид:

u-X
X
Учитывая коэффициенты получим передаточную функцию линейной части.
![]() ;
;
![]() ;
;![]() ;
;
![]() ;
;
![]() ;
;![]() ;
;![]()

Далее вынесем из числителя 1.944 и из знаменателя 0.000138
![]()
Теперь избавимся
от многочлена числителя, для этого
умножим числитель и знаменатель на
![]() :
:





Остатком можно пренебречь, в итоге имеем следующее выражение для передаточной функции:
![]()
Преобразуем:
![]()
Окончательное выражение для передаточной функции:
![]()
По определению передаточной функции.
![]()
Следовательно:
s(0.0199s+1)X=281.574Xi
s(0.0199s+1)X=281.574F(u-X)
Будем считать, что
на вход системы подано постоянное
воздействие
![]() ,
тогда перейдем от самих величин к их
отклонениям относительно постоянного
входного воздействия. Введем обозначения.
,
тогда перейдем от самих величин к их
отклонениям относительно постоянного
входного воздействия. Введем обозначения.

С учетом этого получим следующую систему уравнений.


Разделив уравнение (1) на (2) и исключив таким образом время, получим дифференциальное уравнение фазовых траекторий:
![]()
Решение данного уравнения будет строиться исходя из заданной нелинейности. В данном случае нелинейной частью системы является трехпозиционное реле .
 (3)
(3)
В соответствии с системой (3) запишем уравнение, с учетом того, что функция является нечетной, т.е. симметрична относительно начала координат:

Пусть в начальный момент времени система выведена в точку М0 с координатами (х0, у0). Проинтегрируем вышеприведенное выражение от х0 до х и от у0 до у.
Найдем решение каждого из уравнений системы по очереди:
1)
![]() .
.
Т.к. изначально система выведена в точку фазовой плоскости М0 с координатами (x0,y0) , то интегрирование будет: от x0 до x ; от y0 до y.
Найдем решение каждого уравнения:
1)
получим
![]()
2)
![]()
![]()
![]() - отрезок прямой
для интервала
- отрезок прямой
для интервала
![]()
3)
![]()
![]()
Задаваясь различными значениями "у" построим фазовый портрет системы.
1-ая прямая
![]()
![]()
![]()
![]()
2-ая прямая
![]()
![]()
![]()
![]()
3-я прямая
![]()
![]()
![]()
![]()
4-ая прямая
![]()
![]()
![]()
![]()
5-ая прямая
![]()
![]()
![]()
![]()

Т.к. по данному фазовому портрету сложно судить об устойчивости системы построим фазовый портрет более детально.

![]() -
передаточная функция линейной части
системы.
-
передаточная функция линейной части
системы.
В данной передаточной
функции
![]() -
идеальное интегрирующее звено и
-
идеальное интегрирующее звено и
![]() -
апериодическое звено 1-го порядка.
-
апериодическое звено 1-го порядка.
Линейная часть системы будет описываться уравнением:
![]()
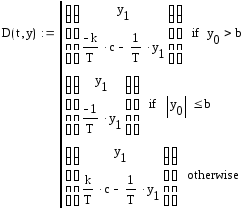
Характеристика нелинейного элемента разбивается на три линейных участка и для каждого из них составляется дифференциальное линейное уравнение:

Для фазовой плоскости введем координаты y и z=dy/dz. Исключим в предыдущих уравнениях время t.
 (***)
(***)
Разделяя переменные и интегрируя, получим уравнения фазовых траекторий для участков 1-3 нелинейной характеристики.
Первоначально на фазовой плоскости наносят линии переключения, разделяющие плоскость на три области. Это линии от одного участка нелинейной характеристики к другому.
Затем строят фазовые траектории. При этом должно учитываться правило: в верхней полуплоскости фазовая траектория движется слева направо, в нижней справа налево.
В целом фазовые траектории принимают спиралевидную форму, что соответствует затухающим колебательным процессам.
Однако колебательный
процесс затухает не до нуля, а до
некоторого значения внутри интервала
![]() ,
определяемого зоной нечувствительности.
Таким образом имеем отрезок особых
равновесных состояний.
,
определяемого зоной нечувствительности.
Таким образом имеем отрезок особых
равновесных состояний.
Начальные условия определяют фазовую траекторию, по которой пойдет переходной процесс.
Реализуем программу решения системы уравнений (***) в mathcad.
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Построим фазовый портрет и переходную характеристику нелинейной СУ.

