

-
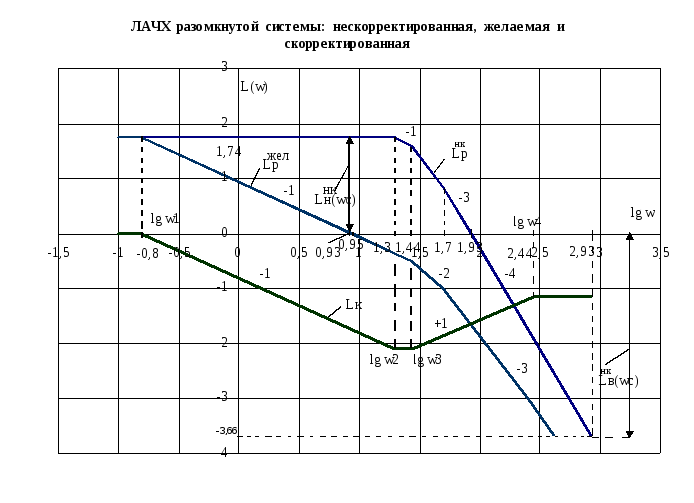
Построение желаемой лачх системы
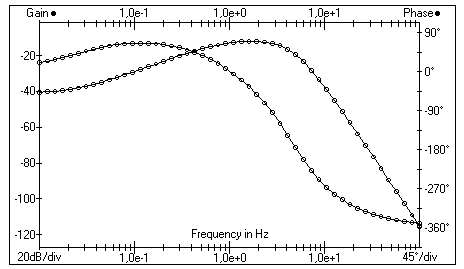
Построим желаемую ЛАЧХ системы в разомкнутом состоянии в
соответствии с требованием обеспечения перерегулирования по
задающему воздействию не более 30 % . Для этого необходим запас
по фазе 45 и по амплитуде L0,75 лог (рис.4). Это должно
соответствовать фазе pжел(с)135. Примем частоты сопряжения
участков с наклоном –1 лог/дек и –2 лог/дек, равной d, участков с
наклоном –2 лог/дек и –3 лог/дек, равной ф, и частоту сопряжения 4
участков с наклонами –3 лог/дек, чтобы она не влияла на запас
устойчивости и L, т.е. 4>100. Для такой конфигурации LРЖЕЛ()
(см. рис. ). L определяется координатами LРЖЕЛ при абсциссе, лежащей
на середине отрезка между lgd и lgф, т.е. должно соблюдаться условие
![]()
(или
![]() ).
).
Частота среза желаемой ЛАЧХ разомкнутой системы принимается
наименьшему из значений, рассчитанных по приведённым
формулам:
![]() ;
. Тогда
;
. Тогда
![]()
![]()
![]()
![]()
Выбираем lg С=0,95 (С=100,95=8,91 с-1).
![]()
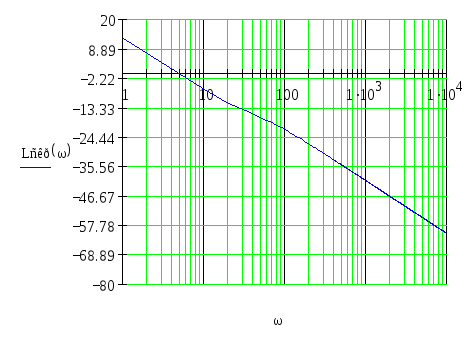
По приведенной выше методике определена частота С и построена
желаемая ЛАЧХ LРЖЕЛ().
Динамическая составляющая ЛАЧХ LК!() корректирующего устройства
(коэффициент КI учтен в КР МАКС) получается путем вычитания
зависимости LРНК() из LРЖЕЛ(), т.е.
![]()
Полная ЛАЧХ корректирующего устройства
LК()=lg К1 + LК!().
Построим ЛАЧХ корректирующего устройства.
В качестве реализации схемотехники выберем операционный
усилитель, включённый по схеме, рис.5.
Передаточная функция будет иметь вид:

Данному случаю соответствует комбинированная коррекция, при
T1>T2>T3>T4.
По полученному выражению передаточной функции составим
Рис.4
систему из пяти уравнений для нахождения неизвестных
параметров корректирующего устройства. Примем значение
![]() ,
а остальные параметры получим из
решения системы
,
а остальные параметры получим из
решения системы
уравнений.
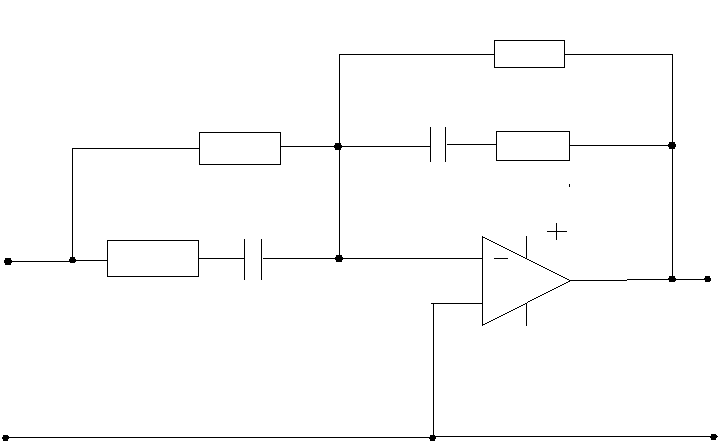
Рис.5
![]()
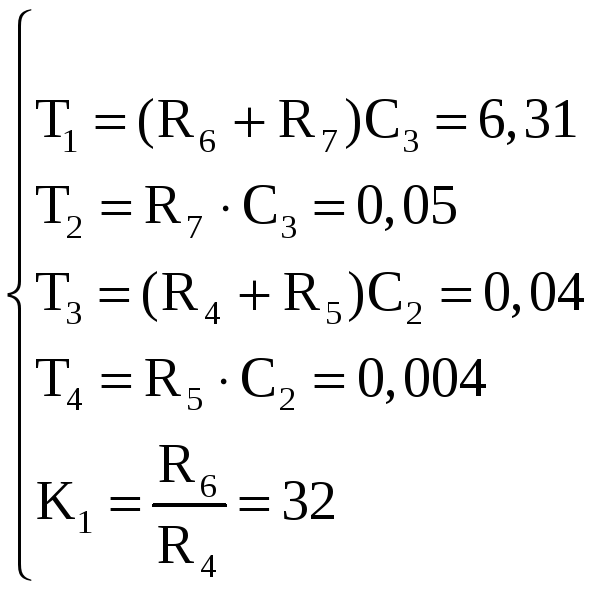
Из полученной системы уравнений находим:
![]() Ом
Ом![]()
![]() Ом
Ом
![]() ;
;
![]()
Ом![]()
![]()
![]()
Найдём передаточную функцию скорректированной
разомкнутой системы:
 .
.
ЛАЧХ скорректированной разомкнутой системы имеет вид(в
децибелах):
![]()
![]()
![]()
![]()
График на рис.6:
Рис.6
![]()
Желаемая ЛАЧХ передаточной функции
разомкнутой системы имеет вид (в децибелах):
![]()
![]()
![]() .
.
Найдём логарифмическую АЧХ прямого канала
скорректированной системы:
![]() –
–
![]()
![]()
![]()
Логарифмическая АЧХ обратного канала:
![]()
Обратная ЛАЧХ канала обратной связи:
![]()
Найдём фазочастотную характеристику прямого канала
скорректированной САУ:
![]() –
–
 ;
; ![]()
По полученным выражениям построим графики ЛАЧХ.
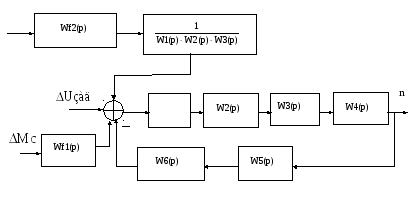
Преобразуем структурную схему к виду, удобному для
построения ЛЧХ по отношению к управляющему воздействию
![]()
![]() и
основным возмущающим воздействиям
и
основным возмущающим воздействиям
![]() :
:
Рис. 7
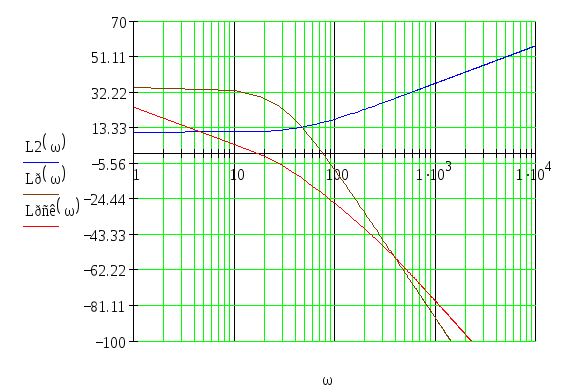
Рис.8 Преобразованная структурная схема схема САУ
Передаточная функция замкнутой системы по отношению к
задающему воздействию при равенстве нулю возмущающих
воздействий имеет вид:
![]() .
.
Передаточная функция замкнутой системы по возмущающему
воздействию(колебанию
напряжения сети
![]() )
равна:
)
равна:
![]()
![]()
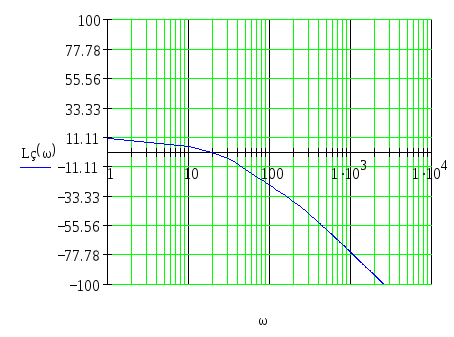
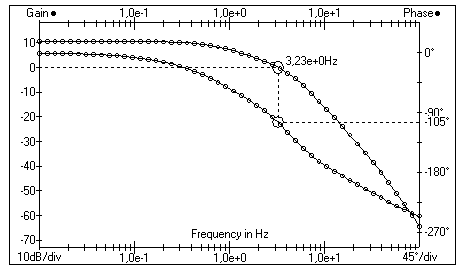
Точная ЛАЧХ замкнутой скорректированной системы будет
иметь вид(рис.9):
Рис.9
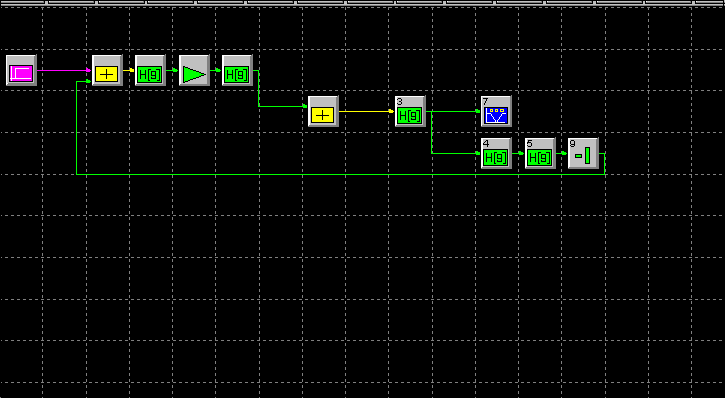
Построим точные ЛАЧХ САУ моделированием, для этого
Используем непреобразованную структурную схему,
записанную в программе Sistem View, рис. 10.
Согласно графикам рис.10 замкнутая скорректированная система
является устойчивой, так как частота среза ЛАЧХ меньше частоты,
при
которой ЛФЧХ пересекает линию фазы
![]()
Коэффициент скорректированной разомкнутой системы равен:
![]()
Согласно графика максимум модуля частотной характеристики равен:
![]() .
.
Значение
АЧХ при
![]() равно:
равно:
 ;
;
 .
.
Рис.10
Показатель колебательности M равен:
Показатель колебательности является удовлетворительным, так как не
превышает 1,5 для нормально работающих систем.
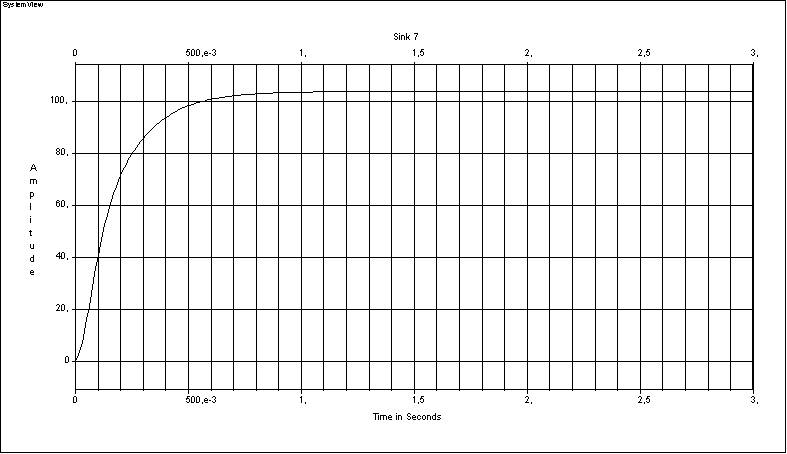
Рис.11
Время регулирования является временем переходного процесса системы,
в данном случае практически принимают равным 3Т.
Переходная характеристика Рис. 11

Из рис.11. время регулирования равно:
![]()
Перерегулирование в данном случае практически равно нулю.
Рис.12
![]()
При отсутствии задающего воздействия и наличии возмущающего
воздействия график переходной функции имеет вид, рис 14.
Наличие всплеска говорит о незначительном затухающем
колебании
в системе,
которое при подаче задающего
воздействия
![]()
не влияет на работу системы и вид переходной характеристики будет
как на рис. 11 и рис.12.
На рис.15 показана ЛАЧХ при возмущающем воздействии, которая
принимает отрицательные значения на всём диапазоне частот. Система
остаётся устойчивой.
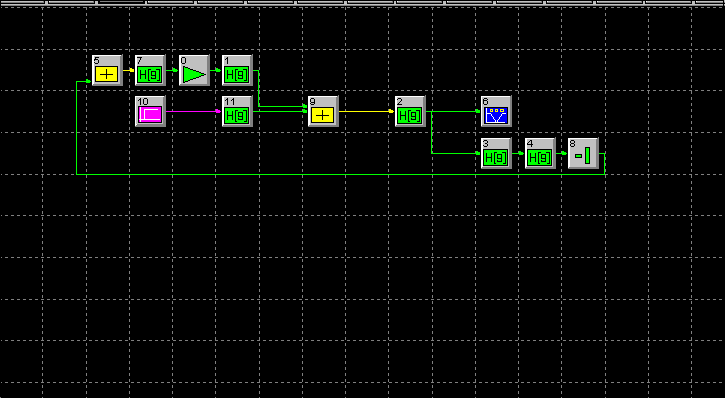
Рис.13
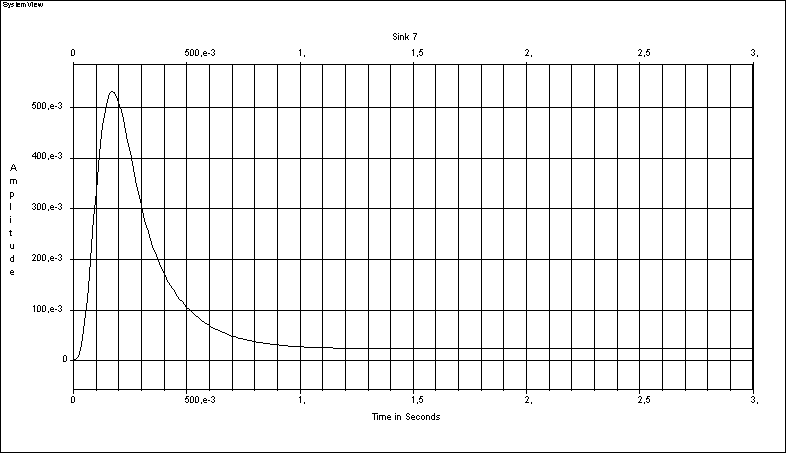
Рис.14
Рис.15
Библиография:
1. Теория автоматического управления: Учебник для вузов /Под ред.
А.В. Нетушила. – 2-е изд. – М.: Высш. шк., 1976. – 400 с.
2. Куропаткин П.В. Теория автоматического управления: Учеб. пособие.
– М.: Высш. шк., 1973. – 527 с.
3. Солодовников В.В. Основы теории и элементы систем
автоматического регулирования: Учеб. пособие. – М.: Машиностроение,
1985. – 536 с.
4. Теория автоматического управления /Под ред. А.А.Воронова. Ч. 1. –
М.: Высш. шк., 1977.
![]()