

ФЕДЕРАЛЬНОЕ АГЕНТСТВО ПО ОБРАЗОВАНИЮ
ГОСУДАРСТВЕННОЕ ОБРАЗОВАТЕЛЬНОЕ УЧРЕЖДЕНИЕ
ВЫСШЕГО ПРОФЕССИОНАЛЬНОГО ОБРАЗОВАНИЯ
ВЯТСКИЙ ГОСУДАРСТВЕННЫЙ УНИВЕРСИТЕТ
Факультет автоматики и вычислительной техники
Кафедра электропривода и автоматизации промышленных установок
Курсовая работа
по дисциплине: Теория автоматического управления
Вариант №34
Выполнил: студент 2-го курса
Золотовский Денис Васильевич
Шифр: 2-04-ЭПу-934
Проверил: Рычков Владимир Викентьевич
Киров
2006
В работе произвести статический и динамический расчеты и синтез
корректирующего устройства системы поддержания скорости двигателя
с реальными характеристиками ее функциональных частей.
На рис.1 приведена принципиальная схема замкнутой системы
электропривода, в состав которой входят:
-
двигатель постоянного тока независимого возбуждения М;
-
тиристорный преобразователь ТП с системой импульсно-фазового
управления СИФУ, управляемыми вентилями В и дросселем Др;
-
операционный усилитель У1 для установки необходимого из условий
статики коэффициента усиления замкнутого контура системы и
подбора параметров коррекции, обеспечивающей заданные
динамические свойства замкнутой системы;
-
сумматор на операционном усилителе У2;
-
тахогенератор ТГ с фильтром RФ – CФ .

В
Рис. 1. Принципиальная схема замкнутой системы электропривода
1. Исходные данные:
Таблица 1
Статическая характеристика тп
|
Ud , В |
0 |
15 |
50 |
100 |
160 |
200 |
220 |
240 |
250 |
255 |
260 |
|
UЗ , В |
0 |
5 |
10 |
15 |
20 |
25 |
30 |
35 |
40 |
45 |
50 |
Статическая характеристика тиристорного преобразователя, емкость
конденсатора СФ =20 мкФ и сопротивление RФ=1 кОм фильтра и
сопротивления R1=R2=R3=10 кОм являются общими для всех
вариантов задания.
Паспортные данные двигателя М: номинальное напряжение UH=220 В;
номинальная скорость nH ; номинальный ток IH; момент инерции J
системы электропривода; заданная скорость nЗАД; данные силовой цепи
ТП-Д – сопротивление RЯЦ и индуктивность LЯЦ якорной цепи, а также
коэффициент передачи тахогенератора КТГ по вариантам приведены в
табл. 2.
Таблица 2
|
№ варианта |
Данные электродвигателя UH=220 В |
Силовая цепь |
ТГ |
|||||
|
nH 1/c |
PH, кВт |
IH, А |
J
|
nЗАД 1/с |
RЯцт Ом |
LЯЦ мГн |
КТ В/с |
|
|
34 |
104,7 |
19 |
103 |
0,8 |
104,7 |
0,28 |
6,4 |
0,286 |
1. Расчёт полной нелинеаризованной схемы
Найдём сопротивление якоря двигателя:
![]()
![]() Ом.
Ом.
Отсюда электромагнитная постоянная времени:


![]()
Найдём конструктивный коэффициент двигателя:


![]() .
.
Найдём электромеханическую постоянную времени:

Постоянная времени двигателя равна:
![]()
![]()
Определим коэффициент затухания:

Угловая частота двигателя равна:


По данным таблицы 1 построим статическую характеристику
тиристорного
преобразователя
![]() (рис.2).
(рис.2).
Рис.2
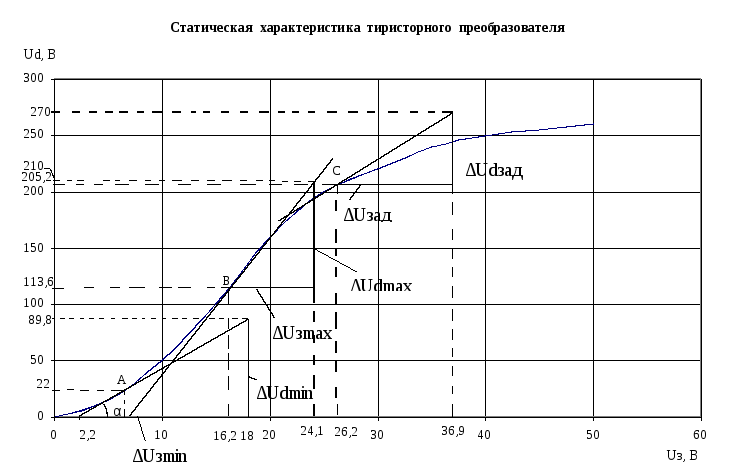
Из графической зависимости Ud =f(U3), по данным табл. 1,
построенной в одинаковом масштабе по обеим осям, определяется
коэффициент
![]() динамической линеаризации статической
динамической линеаризации статической
характеристики
тиристорного преобразователя. Коэффициент
![]()
определим
графически как тангенс угла наклона
касательной
![]() ,
,
проведенной к статической характеристике в рабочей точке А.
Рабочую точку А определим значением выпрямленного напряжения
Ud|A, в режиме идеального холостого хода электродвигателя. Значение
kП определим в трех рабочих точках А, В, С:
1)
![]() при минимальном значении Ud
в заданном диапазоне
при минимальном значении Ud
в заданном диапазоне
регулирования D=10, при этом:
![]() ;
;
![]()
Найдём
коэффициент
![]() :
:

 ;
;
2)
![]() в точке В с максимальным наклоном
статической характеристики:
в точке В с максимальным наклоном
статической характеристики:


3)
![]() при заданном значении выпрямленного
напряжения:
при заданном значении выпрямленного
напряжения:
![]()
![]()


Коэффициент момента равен:

