

3. Определение граничных кривых для требуемых запасов устойчивости и допустимых значений коэффициентов регулятора.
В Exсel заполняем таблицы значений левой и правой границ устойчивости с учетом требований (- не менее 45 град., -не более 10%) и стоим график зависимости ki от kр границ устойчивости с учетом требований.
Таблица 2
-
ki
0,01
0,1
1
2
3
3,3
kpверх
2,4
2,4
2,3
2
1,59
1,3
kpнижн
0,07
0,07
0,07
0,07
0,07
0,068

Рис. 6. Суммарный график границ соблюдения требований по показателям качества

Рис. 7. Совмещенный график граничных кривых для показателей качества и устойчивой системы
4. Определение оптимальных значений по качественным требованиям к сау
Определим зависимость времени переходного процесса и перерегулирования от коэффициентов. Используя получившийся график, находим точки, лежащие в нужной области графика, значения коэффициентов подставляем параметры регулятора в схеме и полученные данные заносим в таблицы.
Зависимости показателей качества от ki и kp
Таблицы 3,4,5,6
-
σ
ki
σ
kp
0
0,1
0,6
2
0
1
0
2,3
1,5
2
0
2,4
-
tпп
ki
tпп
kp
163
0,1
115
2
15,4
1
155
2,3
6,36
2
170
2,4
Строим графики зависимости времени переходного процесса и перерегулирования от коэффициентов ki и kр:

Рис. 8. График зависимости перерегулирования от ki

Рис 9. График зависимости перерегулирования от kp
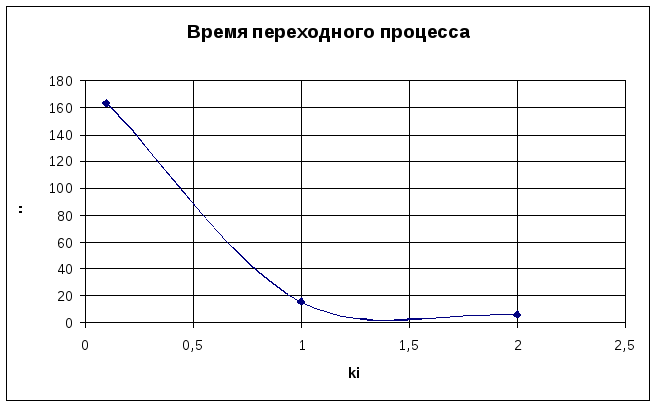
Рис. 10. График зависимости времени переходного процесса от ki
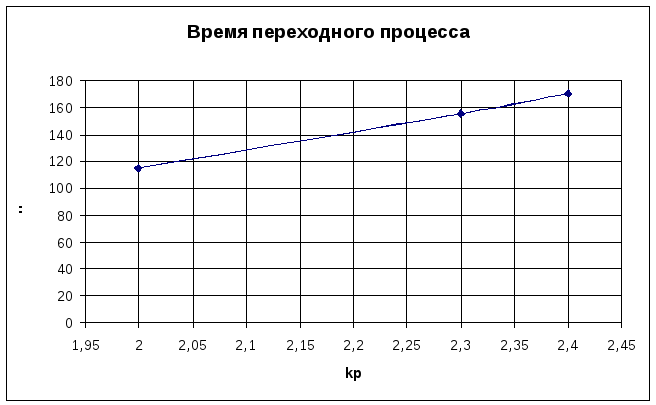
Рис. 11. График зависимости времени переходного процесса от kp
Заключение
В итоге синтеза и исследований системы автоматизации был получен следующий результат:
Система устойчива и имеет приемлемое перерегулирование и наименьшее время переходного процесса (при статической ошибке 5%) tnn=6,23, =1,52%, при коэффициентах ПИ-регулятора, равных ki=0,2, kp=2,3.
Библиографический список:
1. Щербаков B.C., Руппель А.А., Глушец В.А. Основы моделирования систем автоматического регулирования и электротехнических систем в среде MATLAB и SIMULINK: Учебное пособие. - Омск: Изд-во СибАДИ, 2003.-160 с.