

ОБЩИЕ ВОПРОСЫ ТЕОРИИ РАБОТЫ СЛЕДЯЩИХ СИСТЕМ
ОСНОВНЫЕ ПОНЯТИЯ И ОПРЕДЕЛЕНИЯ.
Следящими системами являются системы автоматического регулирования, в которых все или несколько задающих воздействий представляют заранее неизвестные функции времени (1).
Основное назначение следящих систем — поддержание углового или линейного значения выходной величины, связанного с валом исполнительного двигателя, имеющего нагрузку в виде момента, в соответствии с положением входной величины.
В настоящее время следящие системы получили широкое распространение в промышленности, военном деле, счетно-решающих устройствах, медицине и т. д. Следящие системы, применяемые в различных отраслях, решают конкретные специальные задачи, обусловленные данным технологическим процессом.

Рис. I
На рис. 1 показана электрическая схема следящей системы, когда в качестве датчиков используются сельсины, работающие в трансформаторном режиме.
Входной величиной следящей системы является угол поворота сельсина-датчика Θвх(t) Устройства, преобразующие механическую величину командного (задающего) вала в электрическую величину, получили название датчиков-преобразователей. Датчики, преобразующие механическую величину (угол поворота, линейное перемещение) управляемого (выходного) вала в электрическую величину, считаются приемниками.
Согласованным положением следящей системы является такое положение осей датчика и приемника, при котором угол рассогласования равен нулю.
При повороте задающей оси на угол Θвх, в системе появляется рассогласование
δ = Θвх - Θвых. (1)
и на вход усилителя поступает напряжение рассогласования
U δ= K1 δ, (2)
где K1— коэффициент передачи измерителя рассогласования.
Сигнал рассогласования, усиленный усилителем, поступает на обмотку управления двухфазного асинхронного двигателя_— исполнительное устройство. Двигатель, через редуктор, поворачивает выходной вал объекта управления (нагрузку) в сторону уменьшения угла рассогласования.
Функциональная схема электрической следящей системы.
Из всех разнообразных устройств, используемых в следящих системах, можно выделить основные - функционально-необходимые, выполняющие главные функции [5]:
-
задающее устройство — датчик, служащее для подачи в систему задающего воздействия;
-
исполнительное устройство, управляемое в соответствии с задающим воздействием и сообщающее свое движение управляемому объекту — нагрузке;
-
элемент сравнения, производящий измерение и сравнение выходной величины с входной, т. е. определяющий угол рассогласования или погрешность системы;
4) усилительно-преобразующее устройство, служащее для усиления и преобразования сигнала рассогласования в сигнал управления на вход исполнительного устройства.
Кроме основных устройств в состав следящей системы входят корректирующие устройства и дополнительные связи, улучшающие работу системы.
Рассмотрим функциональную схему следящей системы, работающей по принципу отклонения (рис. 2).
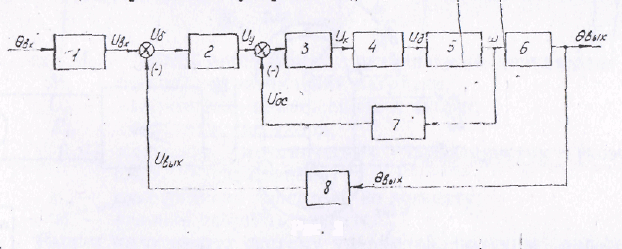
Рис.2
Задающее устройство 1 вырабатывает напряжения UВХ в соответствии с законом изменения Θвх. Датчик главной обратной связи 8 (измерительное устройство) производит измерение выходной координаты Θвых и преобразует ее в электрическую величину Uвых
После сравнения UВХ и UВЫХ (Θвх и Θвых), сигнал рассогласования ошибки поступает на вход предварительного усилительного устройства 2. Звенья 3 и 7 - последовательные и параллельные корректирующие устройства, которые преобразуют UУ и UОС ≡ ω в соответствии с определенным законом в корректирующий сигнал Uк. Звено 7 образует параллельную, обратную связь, охватывающую несколько элементов следящей системы. Сигнал UK усиливается усилителем мощности 4 (ЭМУ, МУС, тиристорный преобразователь и т. п.) до величины UД, которая непосредственно управляет исполнительным устройством 5. Исполнительное устройство, через силовой редуктор, связано с управляемым объектом — нагрузкой.
В зависимости от типа следящей системы и требований предъявляемых к ней, функциональная схема может быть упрощена (например, для случая приборной маломощной следящей системы на переменном токе — отсутствуют усилитель мощности 4 и одно из корректирующих устройств) или еще более усложнена (включать два каскада усилителя мощности, комбинированное управление с компенсирующими сигналами по управляющему и возмущающим воздействиям и т. д.).
Следящая система пропорционального управления.
Основные соотношения в линейных следящих системах рассмотрим на примере следящей системы с пропорциональным управлением, т. е. такой системы, у которой управляющий сигнал (момент исполнительного устройства) пропорционален рассогласованию. Упрощенная принципиальная электрическая схема системы с пропорциональным управлением приведена на рис. 3.
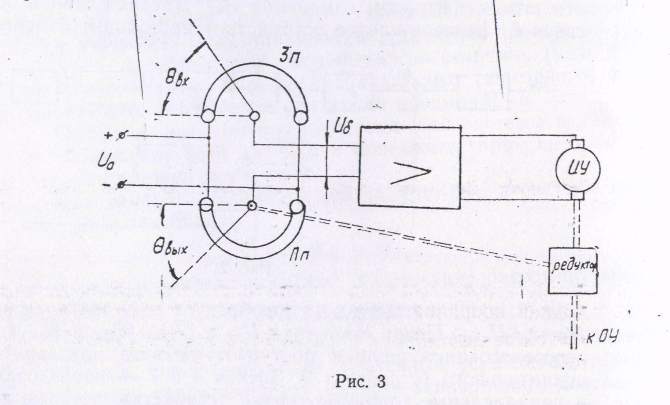
Сигнал ошибки Uδ, пропорциональный углу рассогласования, с потенциометрического измерителя рассогласования поступает на вход знакочувствительного усилителя. Усиленный сигнал UД управляет исполнительным двигателем, который через редуктор связан с объектом управления.
Получим дифференциальное уравнение, описывающее поведение системы в различных режимах.
Элементы сравнения
δ = Θвх - Θвых (3)
где δ — угол рассогласования;
Θвх и Θвых — соответственно углы поворота входного и выходного валов системы.
Измеритель рассогласования
Uδ = К1 δ, (4)
здесь Uδ — напряжение рассогласования;
К1— коэффициент передачи измерителя рассогласования.
Усилитель
UД = K2Uδ (5)
где K2 — коэффициент усиления усилителя.
Исполнительное устройство — двигатель постоянного тока с независимым возбуждением при
управлении напряжением на якоре
![]()
![]() (6)
(6)
где МД — вращающий момент, развиваемый двигателем;
МС — момент сопротивления нагрузки;
UД — напряжение, приложенное к якорю;
RЯ —сопротивление якоря;
β —жесткость механических характеристик (коэффициент вязкого трения);
см — коэффициент двигателя по моменту;
ω — угловая скорость двигателя.
Решая полученную систему уравнений, получим дифференциальное уравнение ошибки следящей системы с пропорциональным управлением относительно входного воздействия
![]() ,
,
![]() (7)
(7)
Полученное уравнение для ошибки позволяет определить статическую ошибку, ошибку установившегося динамического режима и ошибку в неустановившемся динамическом режиме.
Для статического режима имеем
![]()
![]()
![]()
![]()
![]() (8)
(8)
т. е. для повышения статической точности системы следует уменьшать статическую нагрузку на валу исполнительного устройства и увеличивать коэффициент передачи системы.
Для установившегося режима
![]()
![]()
![]()
![]() (9)
(9)
Для повышения точности слежения в установившемся режиме при заданной скорости движения входного вала следует уменьшать статизм исполнительного устройства и также увеличивать коэффициент передачи системы.
Для нахождения ошибки переходного процесса необходимо задаться определенным законом движения входного вала и, решив уравнение (7), получить выражение для ошибки в неустановившемся динамическом режиме.
Аналогичным образом составляются и решаются уравнения для сложных следящих систем.
ЭЛЕМЕНТЫ ЭЛЕКТРИЧЕСКИХ СЛЕДЯЩИХ СИСТЕМ.
ИЗМЕРИТЕЛИ РАССОГЛАСОВАНИЯ СЛЕДЯЩИХ СИСТЕМ.
Измерители рассогласования предназначены не для измерения абсолютного положения входной (командной) и выходной (исполнительной) оси, а для определения разности их положения— рассогласования и выработки сигнала в функции рассогласования. В основу работы измерителей рассогласования положены известные методы преобразования перемещений в электрические сигналы [2].
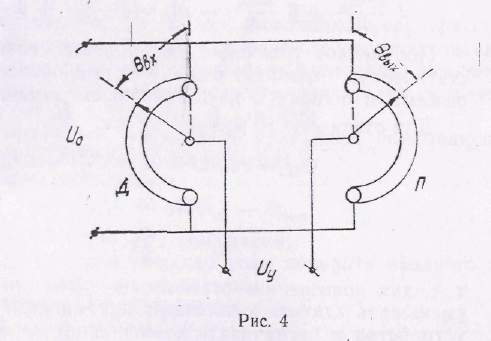
Наибольшее распространение в следящих системах получили потенциометрические и сельсинные измерители рассогласования. На рис. 4 приведена типовая схема включения потенциометрического измерителя рассогласования. Чувствительность (коэффициент передачи) схемы определяется из следующего соотношения:
![]() (10)
(10)
Uо—напряжение питания, В;
![]()
![]() п—полный
угол намотки потенциометра, град.
п—полный
угол намотки потенциометра, град.
В следящих системах с неограниченным диапазоном поворота входной оси используются кольцевые потенциометры (рис 5).
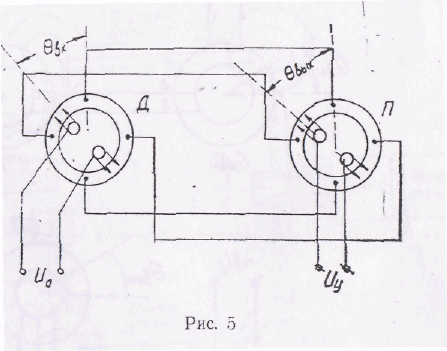
Четырехпроводная линия обеспечивает линейную зависимость управления от угла рассогласования. При выборе параметров потенциометрических датчиков необходимо учитывать режим работы измерителя рассогласования:
-
— выходным сигналом является напряжение — при работе на высокоомную нагрузку;
-
— выходным сигналом является ток — при работе на реле.
К достоинствам потенциометрических измерителей рассогласования необходимо отнести малые габариты и вес, дешевизну, возможность питания постоянным и переменным током. К недостаткам: наличие скользящего контакта, возникновение шумов при переходе контакта с витка на виток, при вибрациях, загрязнении контакта, ограниченный срок службы.
Измерители рассогласования на сельсинах наиболее часто выполняются по трансформаторной схеме включения сельсинов (рис. 6, а). Однофазная обмотка сельсина-датчика подключается к сети переменного тока и создает в сельсине пульсирующий магнитный поток. В согласно включенных трехфазных обмотках индуктируются э. д. с., значения которых определяются взаимным расположением осей обмоток ротора и статора.
На выходе сельсина-приемника имеем
U У = Umax sin (Θвх - Θвых ), (11)
где Umax — амплитуда вторичного напряжения сельсина.
В тех случаях, когда для управления следящей системой требуется осуществить суммирование угловых перемещении двух осей, механически не связанных между собой, применяют схему измерителя рассогласования с использованием дифференциального сельсина (рис. 6, б).
Рис. 6
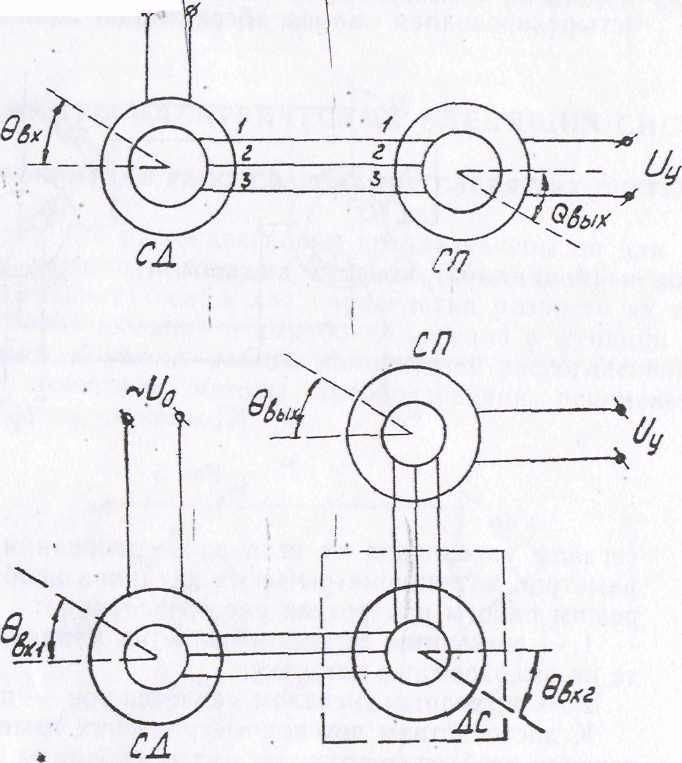
На выходе, в этом случае, получим
U У = Umax sin [(Θвх 1 - Θвх 2) - Θвых)]. (12)
Сельсинная схема измерения угла рассогласования характеризуется чувствительностью до 2В/град и точностью до 0,25 до 1° в зависимости от класса точности сельсинов.
ПОВЫШЕНИЕ ТОЧНОСТИ ИЗМЕРЕНИЯ УГЛА РАССОГЛАСОВАНИЯ С ИСПОЛЬЗОВАНИЕМ
ДВУХОТСЧЕТНОИ
СИСТЕМЫ ИЗМЕРЕНИЯ
НА
СЕЛЬСИНАХ.![]()
В этом случае применяется двухскоростная схема измерения и передачи угла рассогласования или система грубого и точного отсчета (рис.7).
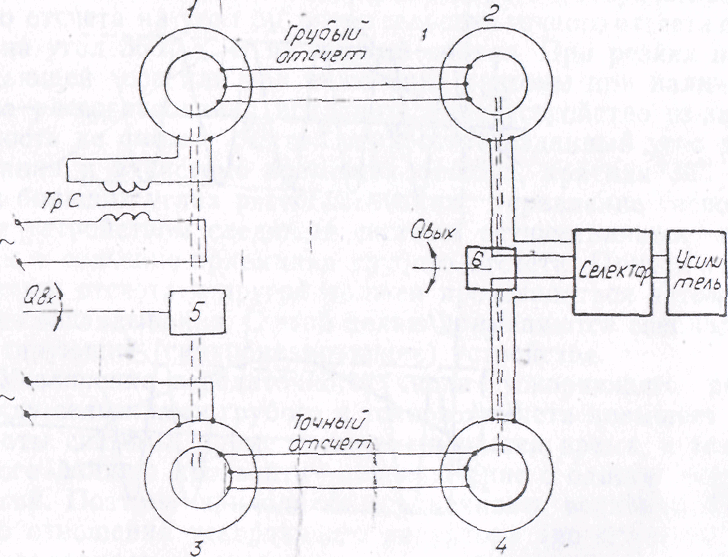
Рис. 7
Трехфазные статорные обмотки сельсинов соединены согласно между собой и служат для грубого 1—2 и точного отсчета 3 — 4. Роторы сельсинов-датчиков грубого и точного отсчета связаны между собой с помощью ускоряющего редуктора 5—6 с одинаковым передаточным отношением i>l. Если теперь входной вал системы повернуть на угол Θвх, то ротор сельсина грубого отсчета повернется на такой же угол, а ротор сельсина точного отсчета на угол iΘвх. Из-за наличия погрешности в схеме точного отсчета следящая система повернет сельсин-приемник точного отсчета на угол
![]() (13)
(13)
где δ — погрешность системы.
В итоге выходной вал системы повернется на угол
![]() (14)
(14)
и, следовательно, абсолютная погрешность уменьшится в i раз. Рассмотрим подробнее работу двухотсчетного узла измерения на сельсинах. При повороте входной оси в системе появится рассогласование и на выходе сельсинов грубого и точного отсчета появится напряжение. В одном периоде напряжение грубого отсчета будет укладываться i периодов напряжения точного отсчета. Например, при передаточном отношении редуктора. 10:1 один период напряжения грубого отсчета соответствует десяти периодам точного отсчета, и напряжения на выходе сельсинов грубого и точного отсчетов соответственно характеризуются кривыми 1 и 2 (рис. 8).

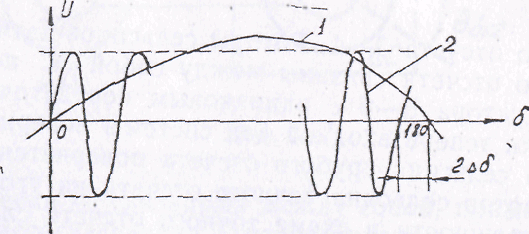
Рис.8.
Из сравнения начальных участков кривых следует, что при углах рассогласования меньше 9° напряжение точного отсчета возрастает значительно интенсивнее, чем напряжение грубого отсчета. Следовательно, следящая система при малых углах рассогласования будет работать точнее, если для управления используется напряжение сельсина точного отсчета. Однако при больших углах рассогласования управление только сигналами точного отсчета вызывает определенные осложнения. Так, при повороте ротора сельсина грубого отсчета на угол 36° ротор сельсина точного отсчета повернется на угол 3600 , т. е. на полный оборот. При резких поворотах задающей оси или при включении системы при наличии в ней угла рассогласования исполнительное устройство из-за инерционности не сможет быстро отработать заданный угол рассогласования, и в системе возможна ошибка, кратная 36°. Поэтому при больших углах рассогласования управление исполнительным устройством следящей системы осуществляется напряжением с сельсино-приемника грубого отсчета. Причем переход от системы отсчета к другой должен производиться автоматически и без запаздывания. С этой целью применяются специальные селектирующие (синхронизирующие) устройства.
Увеличение передаточного числа ускоряющего редуктора между сельсинами грубого и точного отсчета повышает точность работы системы, кроме того, уменьшается время, в течение которого должно произойти переключение с одного отсчета на другой. Поэтому приходится ограничивать величину передаточного отношения ускоряющего редуктора (не более40:1), чтобы гарантировать своевременное срабатывание селектора.