2.2 Построение плана положений механизма
Для построения принимаем масштабный коэффициент длины µl=0.0025м/мм.
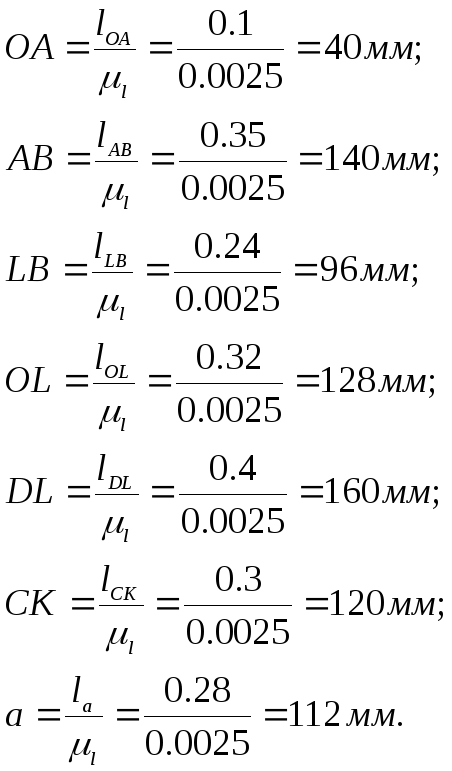
Строим положения механизма, при котором кривошип 1 размещен относительно оси х на 300. Для этого выбираем положение точки О и проводим окружность радиусом ОА (ОА=lОА/ µl – аналогично определяем и другие длины для построения). Также строим положения точки L с помощью размерa OL.
Вычерчиваем положения кривошипа ОА под углом 300 относительно оси х-х. С точки L проводим дугу LВ и прямую движения ползуна, которая задана размером а. С точки А проводим дугу АВ до пересечения с дугой LВ и получаем положения точки В.
С точки L через точку В проводим прямую LD и получаем положение точки D. В месте пересечения прямой LD и прямой движения ползуна получаем положение точки С.
От точки С отложим положение точки К и план положений построен.
Размеры при построении равны
2.3 Аналитический расчет скоростей и ускорений
Для определения скоростей и ускорений аналитическим способом воспользуемся методом замкнутых векторных контуров.
Рассмотрим первый векторный контур (рисунок 2.5).
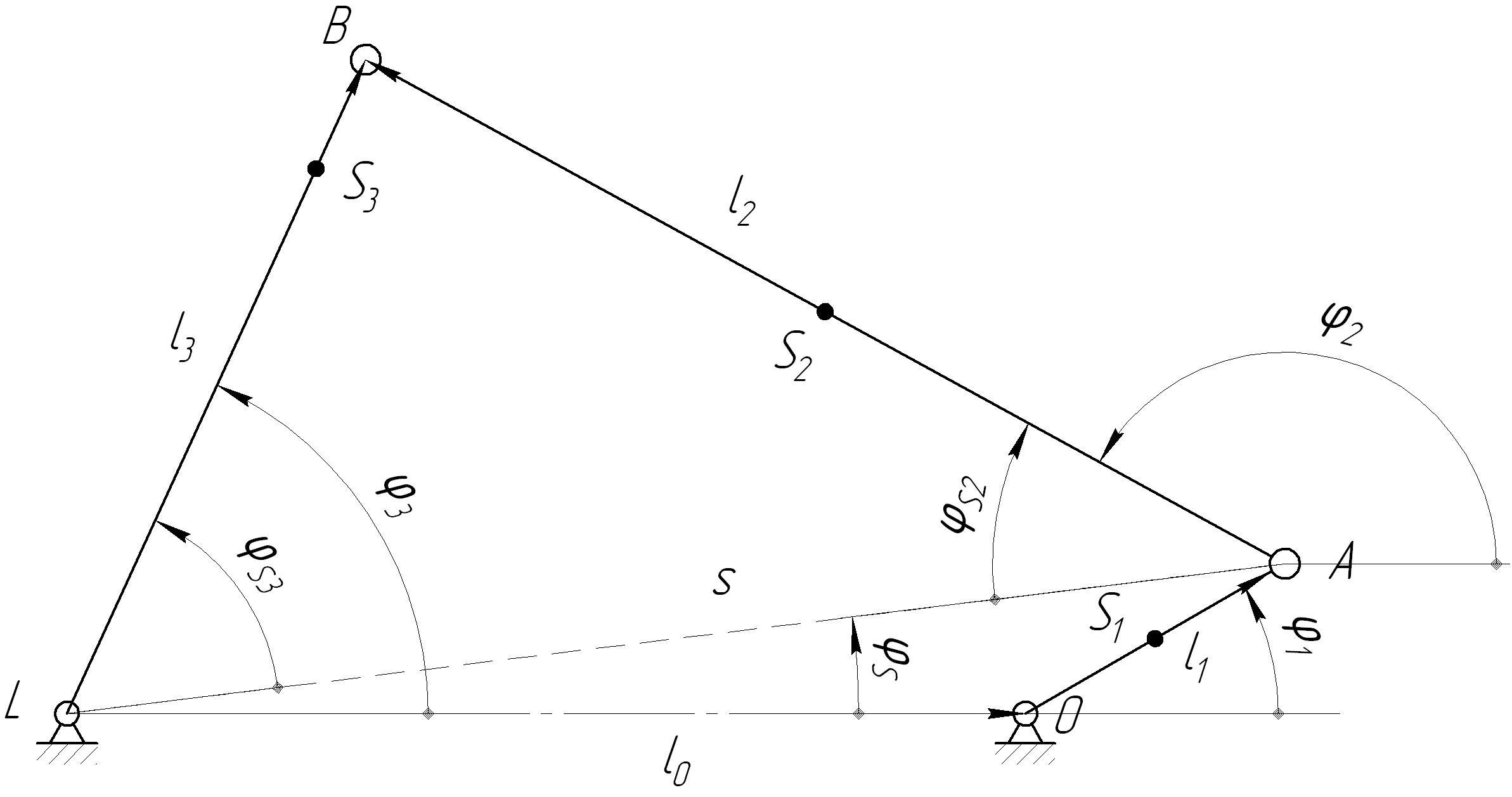
Рисунок 2.5 – Первый векторный контур
Рассмотрим векторний контур ОАBL. Запишем условия замкнутости контура:
![]() (1)
(1)
Уравнение (1) проектируем на оси координат :
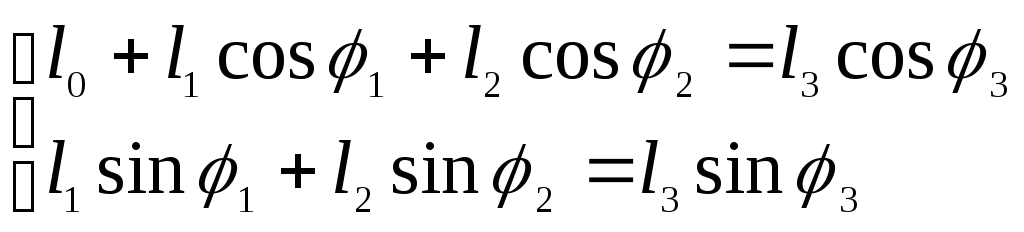 (2)
(2)
Система (2) есть системой с неизвестными углами φ2 и φ3. Для решения системы контур ОАBL разбиваем на два ОАL и АBL.
Рассмотрим контур ОАL и запишем условия замкнутости контура:
![]() (3)
(3)
Уравнения (3) проектируем на оси координат:
![]()
 (4)
(4)
Из системы (4) получаем
Рассмотрим контур АBL и определим углы φ2s и φ3s:
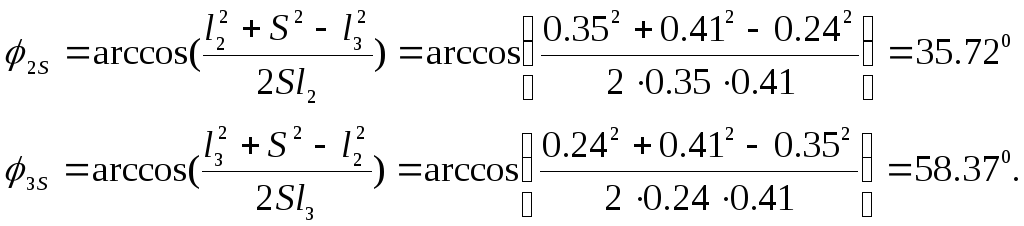
Определяем углы φ2 и φ3:
![]()
Для определения аналогов угловых скоростей ω2 и ω3 звеньев 2 и 3 дифференцируем уравнения (2) по обобщенной координате φ1
 (5)
(5)
Имея
ввиду, что
![]() есть аналог угловой скорости ω2
звена 2 и
есть аналог угловой скорости ω2
звена 2 и
![]() есть аналог угловой скорости ω3
звена 3 получаем
есть аналог угловой скорости ω3
звена 3 получаем
 (6)
(6)
Из углов, входящих в первое уравнение (6), вычитаем общий угол φ2, что соответствует повороту осей координат xAy на общий угол φ2. Имеем
![]()
откуда получаем выражения для аналога u31 и угловой скорости ω3
![]()
После аналогичного преобразования того же уравнения поворотом осей координат на угол φ3 получаем выражение для аналога u21 и угловой скорости ω2
![]()
Для определения угловых ускорений ε2 и ε3 звеньев 2 и 3 дифференцируем по обобщенной координате φ1 уравнение (6) что приводит к уравнению
 (7)
(7)
где,
![]() и
и
![]() - аналоги угловых ускорений. Величины
аналогов можно определить, если выполнить
преобразования координат последовательным
поворотом осей координат на углы φ2
и φ3.
Имеем
- аналоги угловых ускорений. Величины
аналогов можно определить, если выполнить
преобразования координат последовательным
поворотом осей координат на углы φ2
и φ3.
Имеем
Истинные угловые скорости и ускорения звеньев 2 и 3 равны
Рассмотрим второй векторный контур (рисунок 2.6)

Рисунок 2.6 – Второй векторный контур
Запишем векторное уравнение контура
![]() (8)
(8)
Уравнение (8) проектируем на оси координат
 (9)
(9)
Из системы (9) получаем
![]()
Для определения аналогов скоростей и ускорений систему (9) продифференцируем по обобщенной координате φ1
 (10)
(10)
Для определения аналога ускорений уравнения (10) продифференцируем по обобщенной координате φ1
Истинные скорости и ускорения равны
Положение центра масс звеньев находится на их середине.
Скорости равны.